176
March 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
the ground is not visible in stereo. For elevation data derived from lidar, the
low confidence areas would include dense cornfields, mangrove or similar
impenetrable vegetation. The low confidence area polygons are the digital
equivalent to using dashed contours in past standards and practice. Annex
C of the full standard outlines specific guidelines for implementing low
confidence area polygons.
Table 4 lists 10 common vertical accuracy classes and their corresponding
accuracy values and other quality measures according to this standard.
Additional tables in the full standard, not included in this highlight article,
provides the equivalent vertical accuracy measures for the same ten classes
according to the legacy standards of ASPRS 1990 and NMAS of 1947, and
examples of vertical accuracy and the recommended lidar points density for
digital elevation data according to the newASPRS 2014 standard.
H
orizontal
A
ccuracy
R
equirements
for
E
levation
D
ata
New to the geospatial community, the standard specifies horizontal accuracy
thresholds for two types of digital elevation data with different horizontal
accuracy requirements:
•
Photogrammetric elevation data:
For elevation data derived using
stereo photogrammetry, the horizontal accuracy equates to the
horizontal accuracy class that would apply to planimetric data or
digital orthoimagery produced from the same source imagery, using
the same aerial triangulation/INS solution.
•
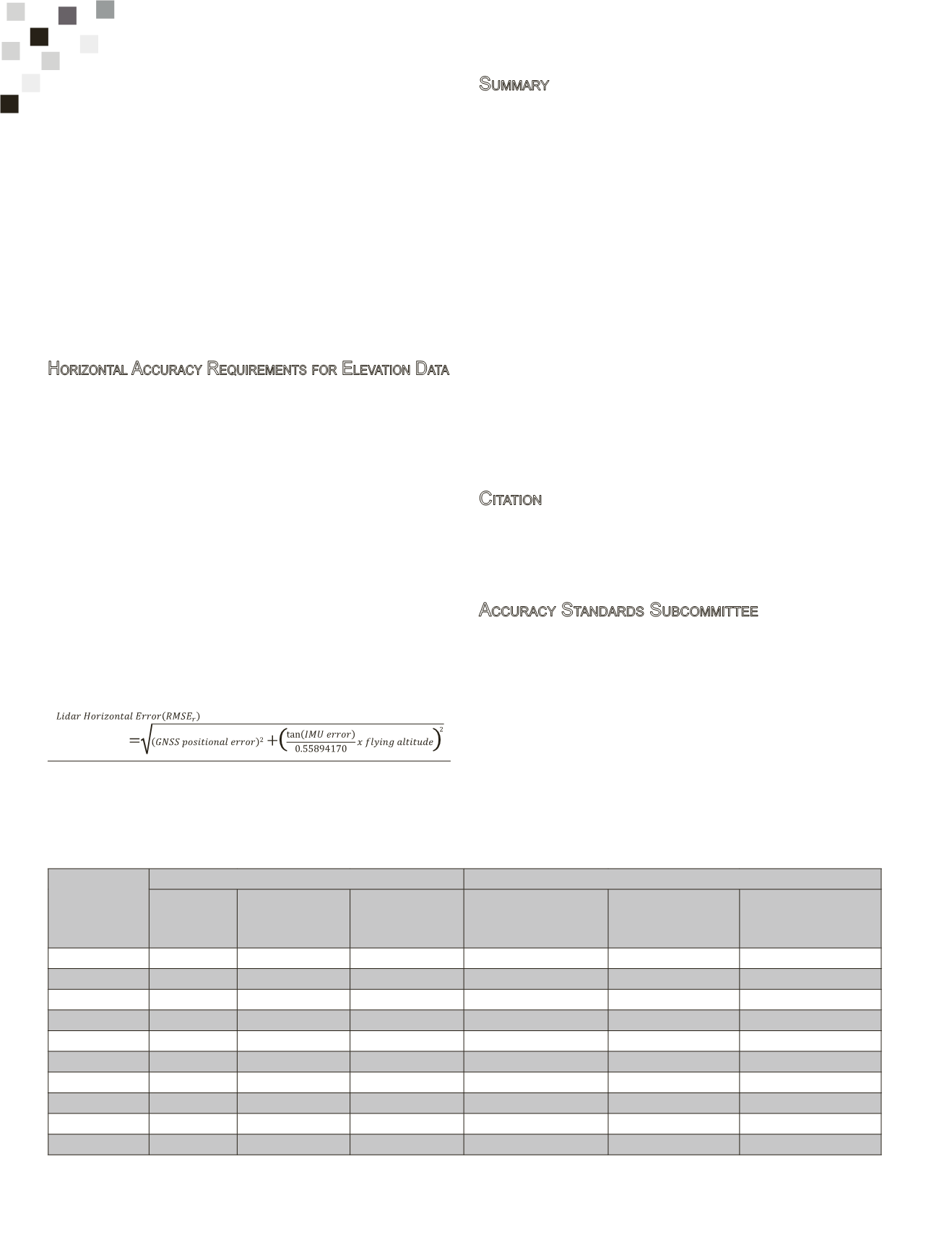
Lidar elevation data:
Horizontal error in lidar derived elevation data
is largely a function of positional error as derived from the Global
Navigation Satellite System (GNSS), attitude (angular orientation)
error (as derived from the INS), and flying altitude; and can be
estimated based on these parameters. The following equation provides
an estimate for the horizontal accuracy for the lidar-derived data
set assuming that the positional accuracy of the GNSS, the attitude
accuracy of the Inertial Measurement Unit (IMU) and the flying
altitude are known:
Table 4. Vertical Accuracy/Quality Examples for Digital Elevation Data
Vertical
Accuracy Class
Absolute Accuracy
Relative Accuracy (where applicable)
RMSE
z
Non-
Vegetated
(cm)
NVA
at 95%
Confidence Level
(cm)
VVA
at 95
th
Percentile
(cm)
Within-Swath Hard
Surface Repeatability
(Max Diff)
(cm)
Swath-to-Swath
Non-Veg Terrain
(RMSD
z
)
(cm)
Swath-to-Swath
Non-Veg Terrain
(Max Diff)
(cm)
1-cm
1.0
2.0
3
0.6
0.8
1.6
2.5-cm
2.5
4.9
7.5
1.5
2
4
5-cm
5.0
9.8
15
3
4
8
10-cm
10.0
19.6
30
6
8
16
15-cm
15.0
29.4
45
9
12
24
20-cm
20.0
39.2
60
12
16
32
33.3-cm
33.3
65.3
100
20
26.7
53.3
66.7-cm
66.7
130.7
200
40
53.3
106.7
100-cm
100.0
196.0
300
60
80
160
333.3-cm
333.3
653.3
1000
200
266.7
533.3
S
ummary
The main standard on the ASPRS portal includes additional information on
the following:
•
References
•
Terms and definitions
•
Symbols, abbreviated terms and notations
•
Assumptions regarding systematic errors and acceptable mean error
•
Horizontal accuracy requirements for elevation data
•
Low confidence areas for elevation data
•
Accuracy requirements for aerial triangulation and INS-based sensor
orientation of digital imagery
•
Accuracy requirements for ground control used for aerial triangulation
•
Checkpoint accuracy and placement requirements
•
Checkpoint density and distribution
•
Relative accuracy of lidar and IFSAR data
•
Positional accuracy reporting
Annex A - Background and Justifications
Annex B - Data Accuracy and Quality Examples
Annex C - Accuracy Testing and Reporting Guidelines
Annex D - Accuracy Statistics and Example
C
itation
ASPRS, 2014. ASPRS Positional Accuracy Standards for Digital Geospatial
Data,
Photogrammetric Engineering & Remote Sensing
, Volume 81, No.
3, 53 p., URL:
A
ccuracy
S
tandards
S
ubcommittee
Dr. Qassim Abdullah
, Woolpert, Arlington, Virginia
Dr. David Maune,
Dewberry Consultants LLC, Fairfax, Virginia
Doug Smith
, David C. Smith & Associates, Inc., Portland, Oregon
Hans Karl Heidemann
, USGS, Sioux Falls, South Dakota
1
The method presented here is one approach; there other methods for esti-
mating the horizontal accuracy of lidar data sets, which are not presented
herein. Abdullah, Q., 2014, unpublished data


