least one random sample set consisting of only inliers is 0.99
(Hartley and Zisserman, 2003). This high number of iterations
allows for the handling of a high probability of outliers (0.78).
The values for w
α
, w
β
,
and w
γ
have been experimentally
determined to be 0.7, 0.2, and 0.1, respectively, by considering
errors generated from each individual positive evidence score
functions
SC
,
SP
,
and
SV
. Three error measures have been
used to quantify the quality of the fit: (a) individual line length
error, (b) corner displacement error, and (c) angular difference
error. These errors have been derived using ten “training”
image frames, that is, five frames each from the indoor and
outdoor test video images. The fit for each individual evidence
has been compared to the fit of reference data (which has been
determined by manual 3
D
/2
D
point correspondences and the
collinearity equations) of the 3
D
wireframe model to the image.
Results and Analysis
Experiments have been designed to demonstrate the applicabil-
ity and performance of the proposed method on datasets with
varying conditions that pose challenges to the matching pro-
cess. Various factors include: (a) occlusions caused by moving
objects such as vehicles and pedestrians, (b) partial removal/
visual loss of the back-projected wireframe model in the scene
due to camera viewpoint changes, and (c) illumination changes
as a result of varying sun-light, shadow changes, and night-time
conditions. The experimental dataset comprises of an indoor
and an outdoor scene collected at York University campus.
The indoor video dataset is captured using a consumer-
grade Nikon D90 digital camera with a 20 mm Nikkor lens
attached to a tripod with a rotatable panoramic head. The
outdoor dataset was obtained using an American Dynam-
ics Speed-Dome
PTZ
camera. The images acquired from the
outdoor surveillance video are of variable quality, with the
majority of image frames being low resolution and noisy. Both
cameras are un-calibrated. The indoor test video comprises of
94 individual image frames, whilst the outdoor video has 144
frames. Each video dataset has continuous viewpoint changes
as a result of camera motion, i.e., rotation and/or zoom, with
variable (slow to moderate) camera speed.
Quality Analysis for Matching
Indoor Scene Image Sequence
Several sample results taken from the indoor dataset are used
to demonstrate the capability of
LR-RANSAC
to handle rotation-
al camera motion, slight changes in focal length (the camera
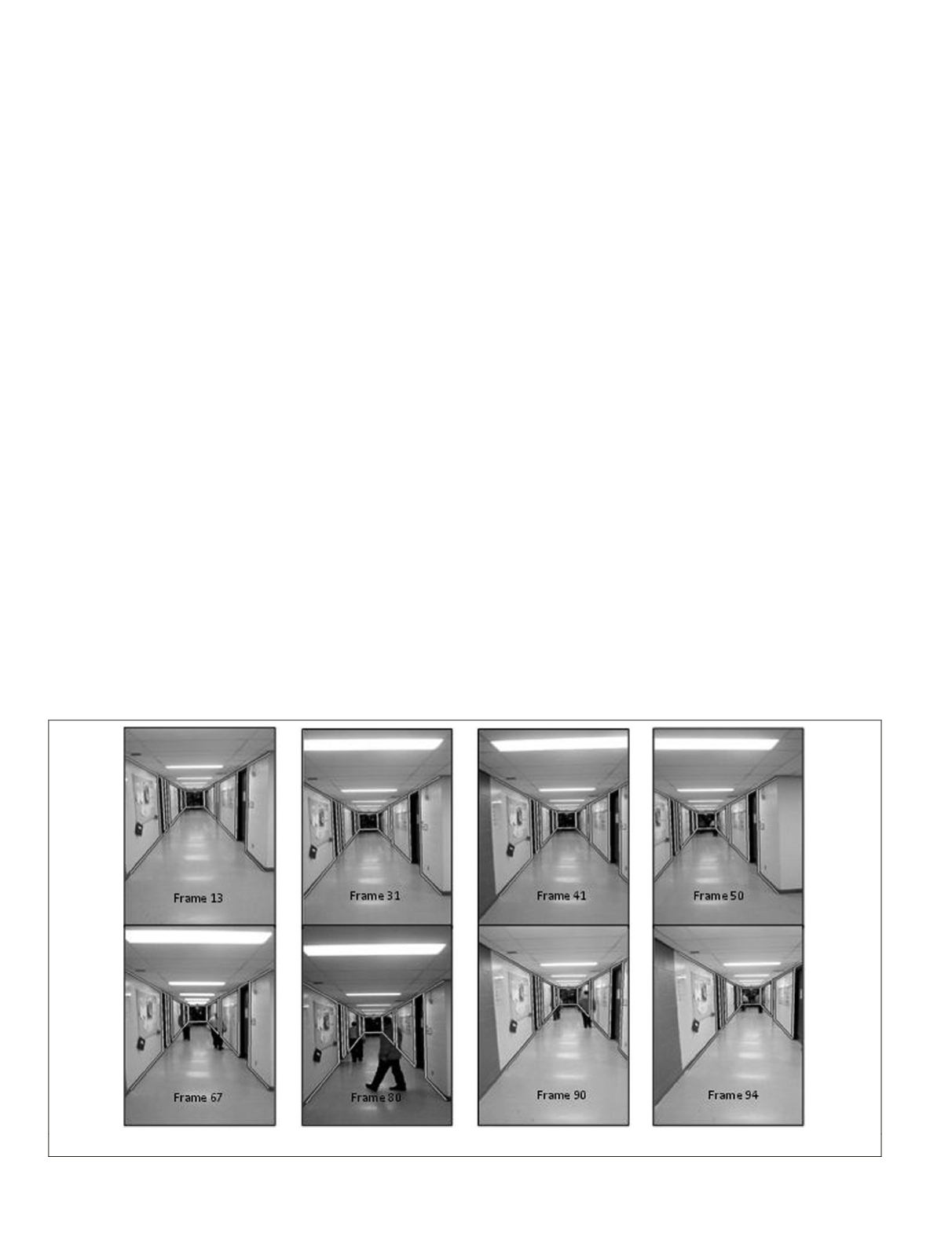
was in auto-focus mode) and occlusions. In Figure 9, frames
67, 80, and 90 demonstrate the algorithm’s performance in re-
covering the camera parameters during partial occlusion with
two pedestrians moving along the corridor. The proposed
approach was also able to achieve successful co-registration
where there is partial occlusion of the scene due to significant
camera movement, as shown for frame 94 (Figure 9). Frames
13 and 31 demonstrate the estimation of the camera parame-
ters due to vertical motion of the camera, while frames 41 and
50 illustrate the results due to horizontal camera motion.
Table 2 summarizes the results corresponding to the frames
in Figure 9. The maximum variation of focal length for the test-
ed image frames is 1mm. The average precision of focal length
is 0.15 mm, while the precision of all angles is less than 1/60
of a degree. The root mean square error and standard deviation
of residuals
v
(RMSE
v
and
σ
v
) are less than two pixels in error.
For all 94 frames of the video sequence, reference camera
parameters (focal length and angular parameters) have been
obtained through space resection for each frame using the
collinearity equations for six pairs of matching wireframe and
image points whose correspondences have been manually
defined. The plots in Figure 10 show the differences between
reference parameters and
LR-RANSAC
-derived parameters across
all of the indoor video sequence frames. The mean errors for
the parameters are: −0.013 mm for focal length, −0.19º for
omega, 0.18° for phi and 0.04° for kappa. The errors in omega
and phi indicate the presence of a slight bias effect in these
two parameters. The cause of such bias can be attributed to
un-modeled systematic effects. The kappa and focal length
errors show a lack of bias as their respective means are close to
zero. The mean absolute errors for parameters are: 0.06 mm for
focal length, 0.24° for omega, 0.23° for phi and 0.18° for kappa.
Outdoor Scene Image Sequence
The conditions in the outdoor dataset present a different
Figure 9. Indoor scene: projected wireframe after refinement via line matching.
854
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


