PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2016
945
Rigorous Strip Adjustment of UAV-based
Laserscanning Data Including Time-Dependent
Correction of Trajectory Errors
Philipp Glira, Norbert Pfeifer, and Gottfried Mandlburger
Abstract
A new generation of laser scanners mounted on Unmanned
Aerial Vehicles (
UAVs
) have the potential to provide high-qual-
ity point clouds of comparatively small areas (a few hectares).
The high maneuverability of the
UAVs
, a typically large field
of view of the laser scanners, and a comparatively small
measurement range lead to point clouds with very high point
density, less occlusions, and low measurement noise. How-
ever, due to the limited payload of
UAVs
, lightweight navi-
gation sensors with a moderate level of accuracy are used
to estimate the platform’s trajectory. As a consequence, the
georeferencing quality of the point clouds is usually sub-op-
timal; for this, strip adjustment can be performed. The main
goal of strip adjustment is to simultaneously optimize the
relative and absolute orientation of the strip-wise collected
point clouds. This is done by fully re-calibrating the laser
scanning system and by correcting systematic measurement
errors of the trajectory. In this paper, we extend our previous
work on the topic of strip adjustment by the estimation of
time-dependent trajectory errors. The errors are thereby mod-
elled by natural cubic splines with constant segment length
in time domain. First results confirm the suitability of this
flexible correction model by reducing the relative and abso-
lute strip discrepancies to 1.38 cm and 1.65 cm, respectively.
Introduction
Airborne Laser Scanning (
ALS
) from
manned
platforms is
a widely used and proven technology for the acquisition
of point clouds over extended areas. Recent developments
created the possibility to mount lightweight laser scanners,
together with the required navigation sensors, on Unmanned
Aerial Vehicles (
UAVs
), whereby small multicopter systems
are typically used. Though such systems are restricted to the
mapping of smaller areas, they have the potential to deliver
high-quality point clouds, i.e., point clouds with very high
and homogeneous point density, footprint diameters of just a
few centimeters, minimal occlusions, and low measurement
noise (Mandlburger
et al
., 2015a).
While the usage of imaging sensors on
UAVs
is already
widespread in many research fields, the application of laser
scanners on
UAVs
is still less common and remains challeng-
ing (Colomina, 2015). One of the main reasons is that, in
contrast to frame based imaging systems, such dynamic laser
scanning systems require a continuous and accurate estimate
of the flight trajectory. This is particularly challenging for
UAVs
, as they typically have highly variable flight dynamics,
can be subject to strong vibrations, and satellite visibility
may be restricted at very low flying altitudes or when flying
between tall buildings or vegetation. Due to the limited pay-
load of
UAVs
, lightweight navigation sensors with a moderate
level of accuracy have to be used, resulting in a comparative-
ly weak estimation of the trajectory. Despite the low flying
altitude of
UAVs
, which is advantageous for the propagation of
angular errors on the point clouds’ georeference, the estimat-
ed trajectory usually cause time-dependent, non-linear defor-
mations of the strip-wise collected point clouds. To correct
these deformations and thereby optimize the georeferencing
of the point clouds,
strip adjustment
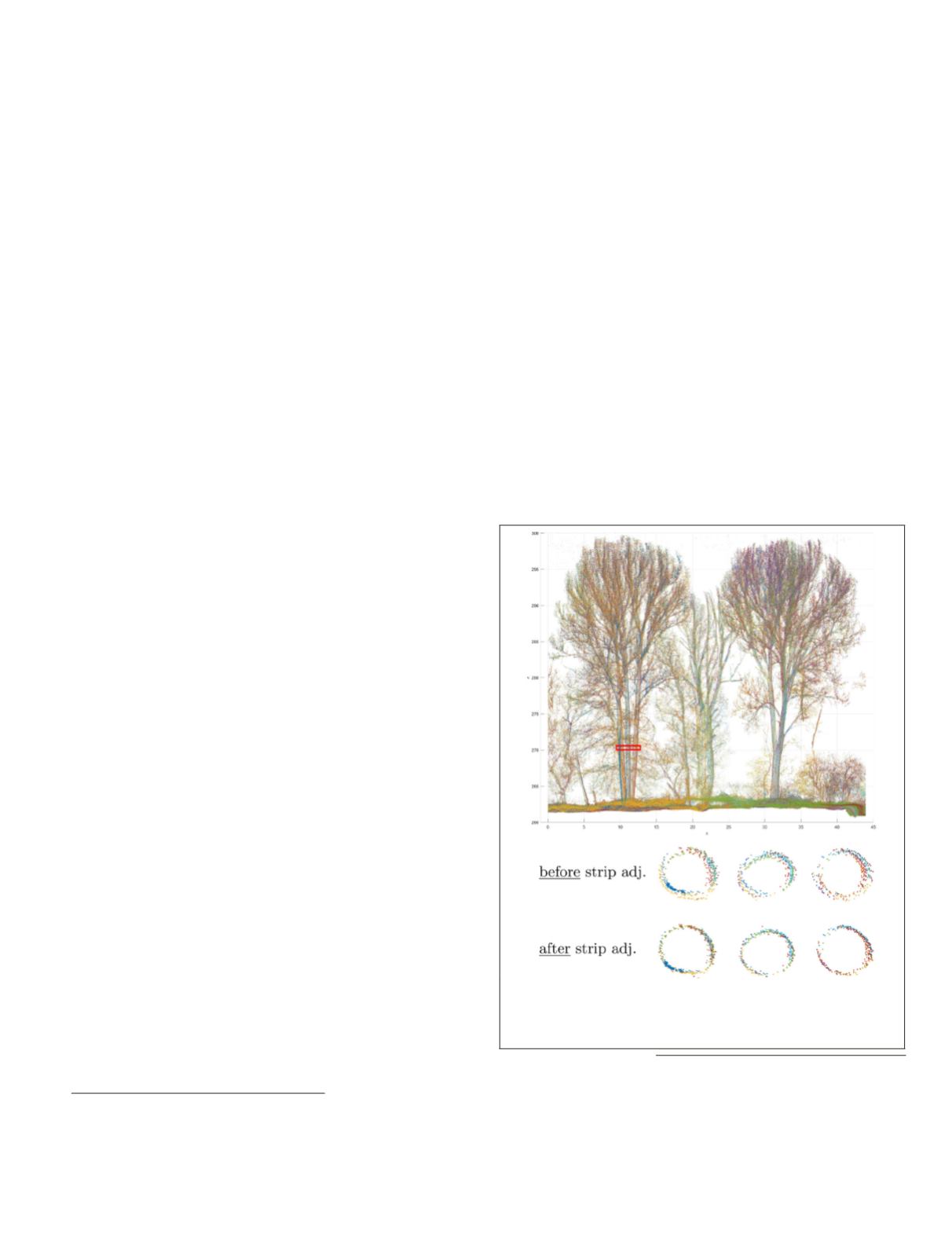
can be performed. In Fig-
ure 1 the point clouds captured from different flight strips are
shown for a small wooded area. A horizontal profile trough
the stems of a tree clearly demonstrate the improved align-
ment of the point clouds after strip adjustment.
Figure 1. Top: Point cloud captured during an ALS campaign
after
strip adjustment
(different colors correspond to different flight
strips). Below: horizontal section through the stems of a tree
(height = 0.5 m) before and after strip adjustment.
Vienna University of Technology, Department for Geode-
sy and Geoinformation, Research Group Photogrammetry,
Gußhausstraße 27-29, 1040 Vienna, Austria
(
).
Photogrammetric Engineering & Remote Sensing
Vol. 82, No. 12, December 2016, pp. 945–954.
0099-1112/16/945–954
© 2016 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.82.12.945


