532
July 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
Given:
An elevation data set with a vertical accuracy of
RMSE
z
= 10 cm according to the new ASPRS 2014 Stan-
dard, express the equivalent accuracy according to the
FGDC NSSDA, for the given dataset.
Solution:
According to NSSDA, the vertical accuracy of an elevation
dataset is estimated at 95 percent confidence level accord-
ing to the following formula:
Vertical Accuracy at 95 percent Confidence Level =
1.9600(
RMSE
z
) = 1.9600(10) = 19.6 cm
HORIZONTAL ACCURACY
EXAMPLE FOR LIDAR DATA
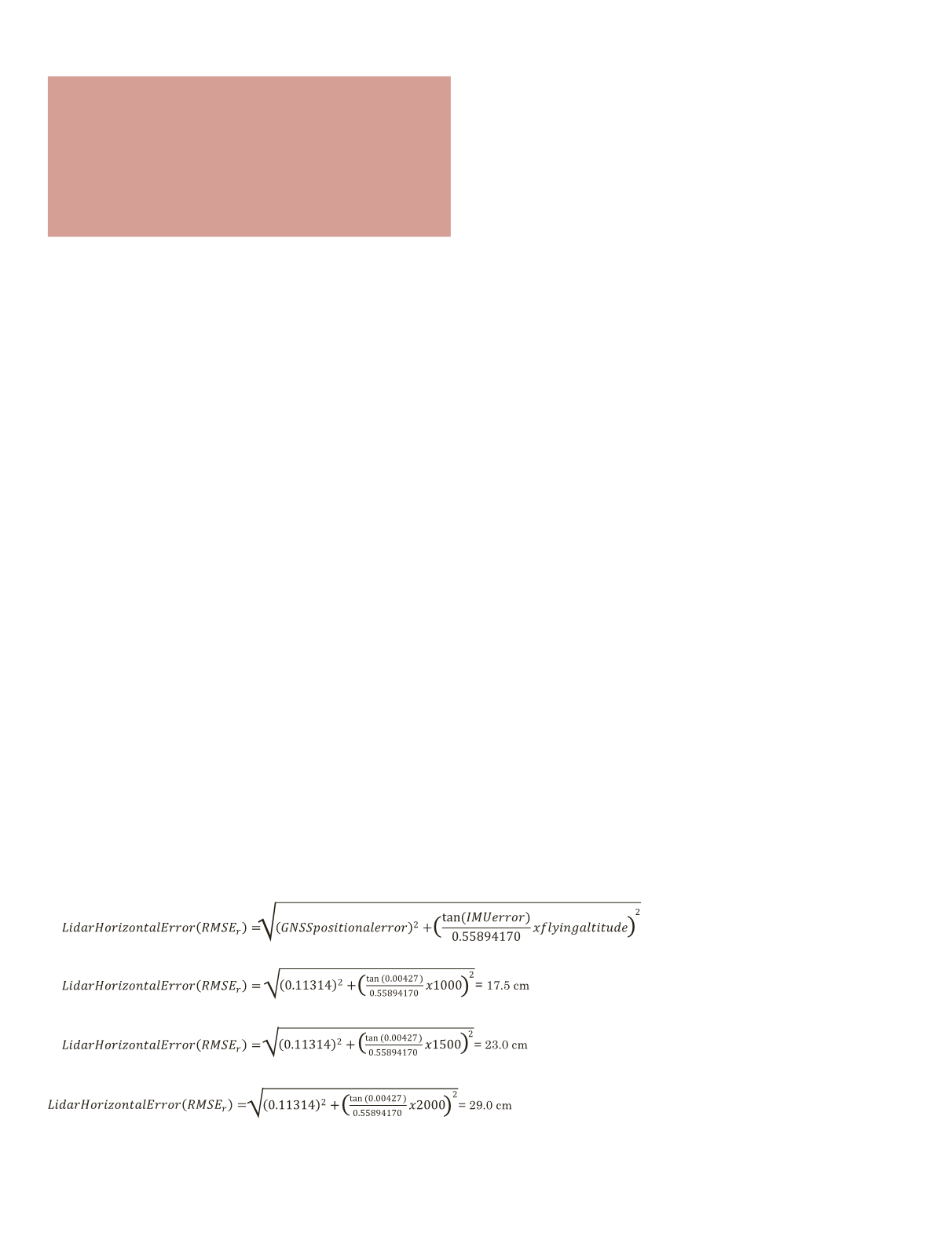
Example 7: Computing the horizontal accuracy of a
LiDAR-derived elevation dataset
Given:
1. IMU attitude angles accuracy (average of roll, pitch,
and heading) = 0.00427 degree
2. Radial horizontal positional error of the GNSS =
0.11314 m (based on 0.08 m in either X or Y)
Estimate the horizontal accuracy of the LiDAR dataset if
the data is collected from an altitude (H) of:
a. 1,000 meter
b. 1,500 meter
c. 2,000 meter
Solution:
Using the formula provided in the new standard:
a. H = 1,000 m
b. H = 1,500 m
c. H = 2,000 m
C
heckpoint
A
ccuracy
,
density
and
distribution
R
equirements
The new standard calls for the checkpoint accuracy to be
three times more accurate than the required accuracy of the
geospatial data set being tested. The new standard states that
the number and distribution of the checkpoints are project
specific and must be determined by a mutual agreement
between the data provider and the end user; however, the
standard states that in no case shall the accuracy of an
elevation dataset, digital orthoimagery or planimetric data be
assessed by less than 20 checkpoints. The standard provides
Table 6 to guide users on the number of checkpoints required
for a mapping project. Due the different natures of projects,
users of the standard need to be aware that the number of
checkpoints given in Table 6 is provided as guideline and
should not be understood as a rigid requirements.
L
ow
C
onfidence
A
reas
in
L
i
DAR
data
The new standard provides a section defining the low
confidence areas associated with LiDAR data processing.
Table 7 provides definition for the low confidence area based
on the nominal point density and area size.
Finally, the new standard offers a new paradigm for
assessing and representing digital geospatial data accuracy.
It diverges from the old measures and concepts that legacy
standards offered. Such divergence makes it harder for users
during the transition period to relate the old concepts of
map scale and contour intervals to the new concepts of the
new standard; however, the tutorial and examples provided
with the new standard document are expected to make this
transition smoother. Users of the standards are encouraged
to provide feedback on the standard to the standard
committee for consideration during future amendments of the
standard. The new standard website can be visited using the
following link:
“The new standard calls for the
checkpoint accuracy to be three times
more accurate than the required
accuracy of the geospatial data set
being tested.”


