is minimum. The random selection of points is carried out
by considering their distribution in the images because the
computed affinity is extended to the whole tile. A grid of
128 × 128 pixels is used to obtain a uniform distribution.
The threshold for transfer error is another input datum
that depends on the expected geo-localization accuracy.
This varies from 1 to 2 pixels (terrain corrected data with
bias-compensated
RPC
s) up to several pixels depending on the
CE90% for raw images without terrain correction.
Two-Step Sliver Removal
Points extracted from different tiles are numerically reassem-
bled to obtain a dataset extended to the overlapping area be-
tween
I
1
and
I
2
. The full dataset is used to warp classification
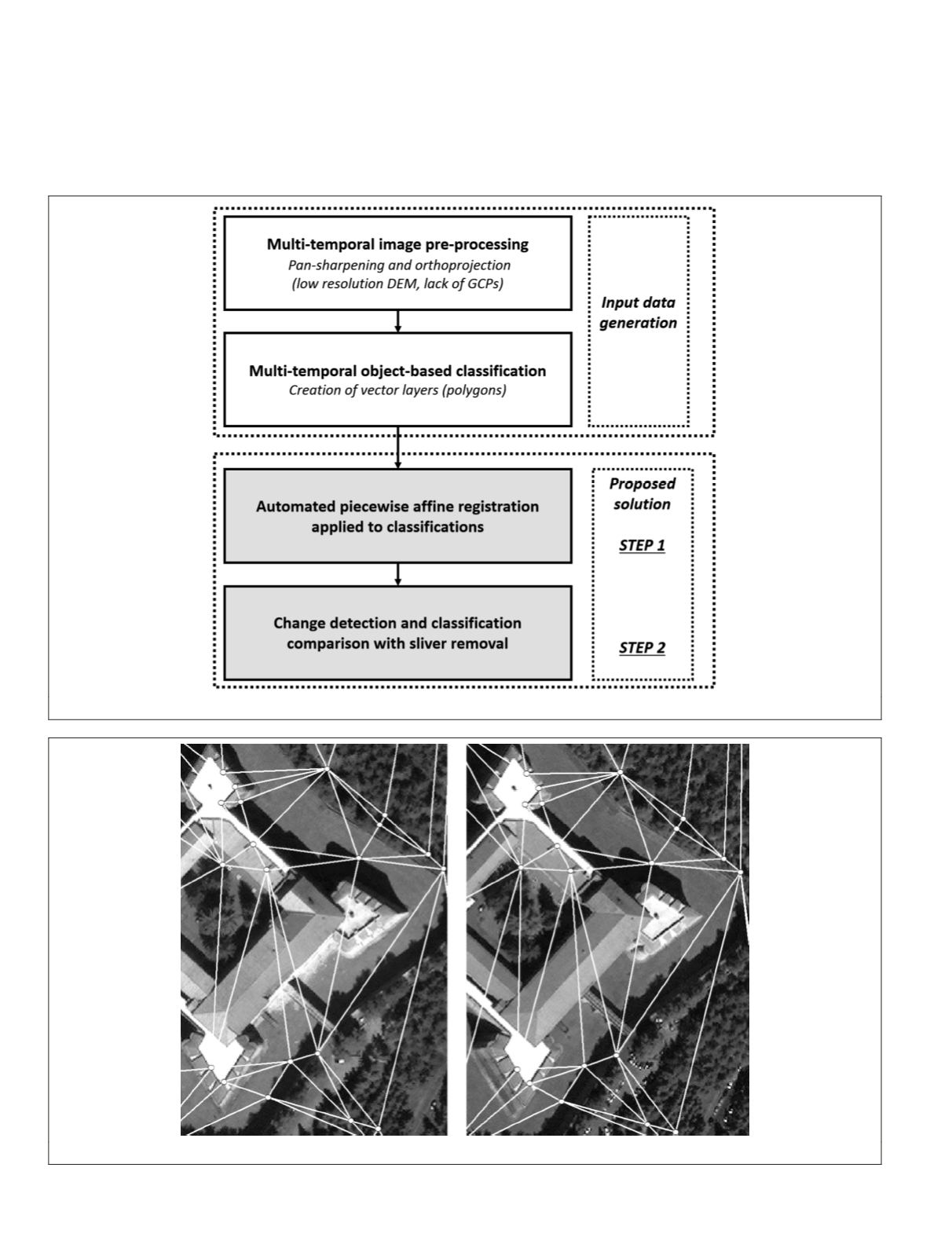
Figure 3. The developed solution for sliver removal in object-based change detection.
Figure 4. Example of automatically generated triangulation scheme for classification registration with piecewise affine function.
164
February 2016
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


