nature of the error signals (small attitude or ephemeris errors,
gyro systems, and in-scan velocity, etc.) can be modeled with
an affine transformation estimated from a set of ground control
points (GCPs), obtaining sub-pixel accuracy also for long strips
(Fraser and Hanley, 2005; Xiong and Zhang, 2009; Fraser and
Ravanbakhsh, 2011). Accurate estimation of correction coef-
ficients also requires an accurate
DEM
, especially in the case of
hilly and mountainous areas (Rogan and Chen, 2004).
Object-based change detection with
VHR
time series is
affected by slivers generated during the segmentation phase.
This means that multitemporal boundaries do not always
match precisely. In the example shown in Figure 2, the same
algorithm for object-based classification was used on two
satellite images acquired at different dates. The extracted
polygonal features (black line and grey areas visualized on the
same image) do not match for (a) the variable off-nadir angle
during image acquisition, and (b) effects during the segmenta-
tion phase. This means that polygon overlay for change detec-
tion (e.g., union, intersection, symmetrical difference, etc.)
will provide some small, spurious polygons.
According to Burrough and McDonnell (1998), the number
of slivers between two polygons can be empirically estimated
as
S
=
2
1 2
1 2
e e
e e
(
)
+
– 3, where
e
1
and
e
2
are the number of nodes of
input polygons. Although this empirical relationship was de-
veloped for
GIS
datasets created with manual measurements, it
highlights a significant issue: the more vertices, the more sliv-
ers. For this reason, automated segmentation for small-object
identification will be more affected by slivers, which must be
detected and removed. Although
GIS
packages have tools for
sliver removal, mainly based on surface analysis (extension,
number of nodes, etc.), it is difficult to set a valid single-value
threshold for complex and large datasets.
This paper presents a novel technique for sliver detection
and removal in object-based change detection. The method
is robust for the problems previously outlined, including the
lack of accurate georeferencing (large mismatches) and vari-
able off-nadir angles or segmentation issues (lack of edge-to-
edge correspondence resulting in slivers).
The Developed Solution for Sliver Detection and Removal
The Proposed Workflow
The proposed solution is a two-step methodology where (a)
classification segments are registered with local geometric
transformations, and (b) the remaining spurious slivers are
removed with additional geometric constraints. The method
is fully automated but requires some initial thresholds that
depend on the local characteristics of the geographic location,
the phenomena under investigation, the available images, and
the main error sources outlined in the previous section (weak
orientation parameters, the resolution of the
DEM
used in
orthorectification, variable off-nadir angles).
The input for the proposed methodology is comprised of
images and classification maps (polygonal shapefiles). Images
can be previously geo-corrected with the bias-compensated
camera model to improve overall geo-localization accuracy.
However, the method can handle images with weak absolute
orientation, including raw images (without correction of the
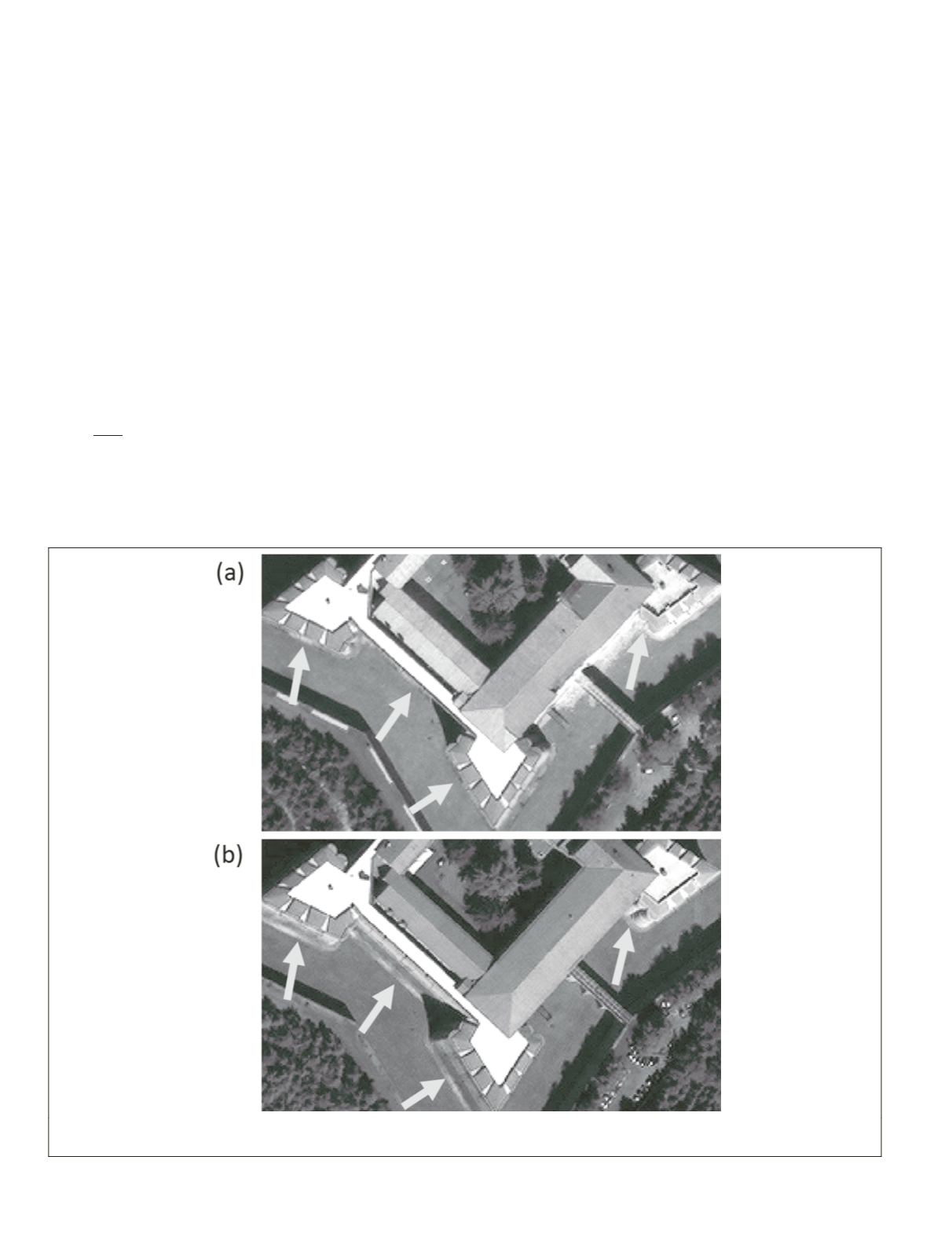
Figure 1. Two QuickBird images acquired with different off-nadir angles: (a) 5.60°, and (b) 10.65°. The spatial displacement due to sub-
vertical objects is about 9 m in (b); ground sampling distance is 0.6 m.
162
February 2016
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


