270
April 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
aerial triangulation/INS solution will also equate to RMSE
x
and RMSE
y
of 10-cm.
LiDAR Elevation Data:
For the first time, the new standard
provides users with a measure to estimate the horizontal
accuracy of data derived from LiDAR. The new standard
recognizes that the horizontal error in LiDAR derived
elevation data is largely a function of positional error as
derived from the Global Navigation Satellite System (GNSS),
attitude (angular orientation) error (as derived from the INS)
and flying altitude; and can be estimated based on these
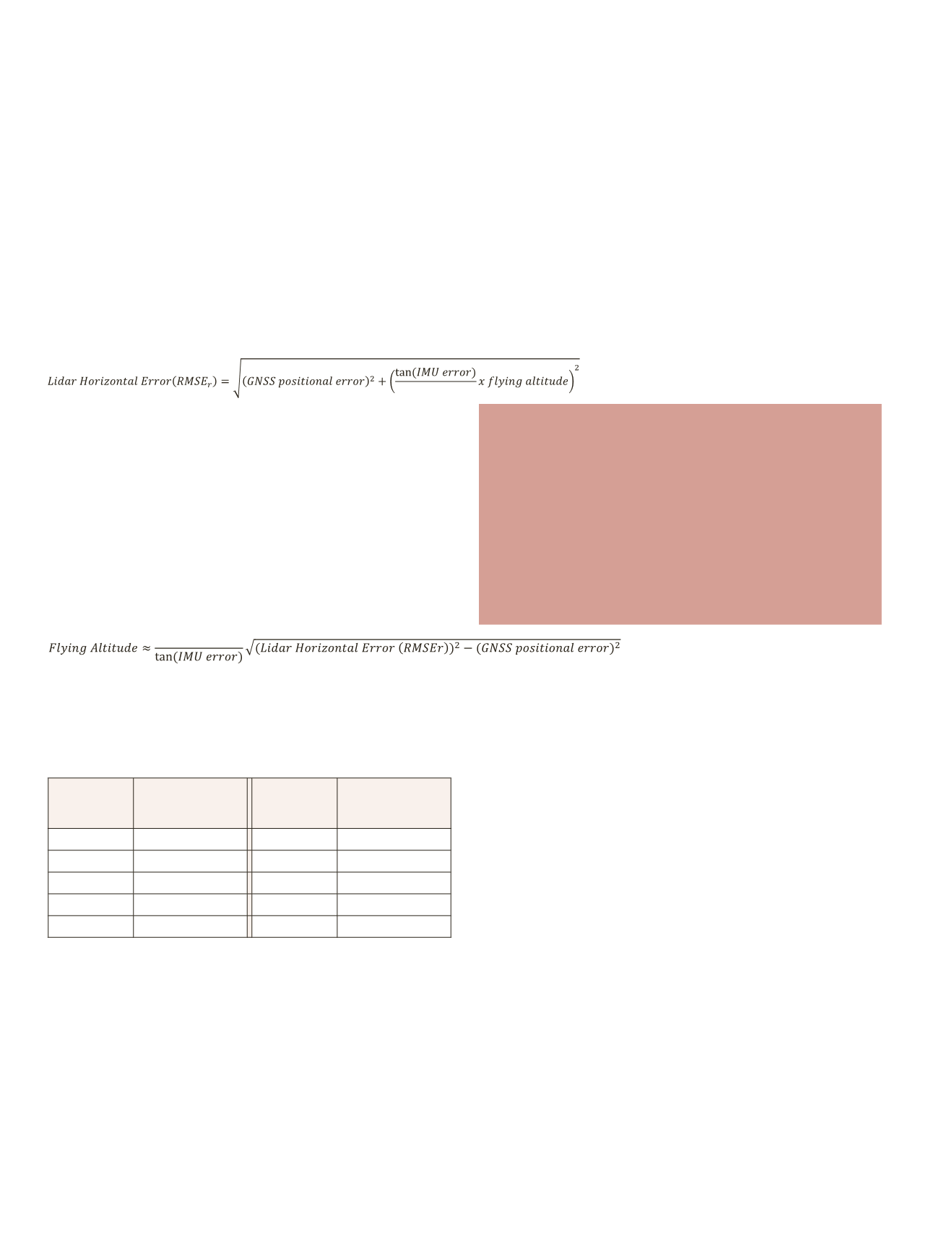
parameters. The standard provides the following equation
to estimate the horizontal accuracy for an elevation dataset
derived from LiDAR-derived:
The above equation considers flying altitude (in meters),
GNSS errors (radial, in cm), IMU errors (in decimal degrees),
and other factors such as ranging and timing errors which are
estimated to be equal to 25% of the orientation errors. The
values for GNSS errors and the IMU errors can be estimated
based on manufacturers’ accuracy specifications for that
GNSS or IMU unit.
The above equation can also be used to estimate the correct
flying altitude if the desired horizontal accuracy figure for
LiDAR data is agreed upon:
Table 2 provides examples on the expected horizontal
accuracy for LiDAR data collected from different altitudes.
Table 2 Expected Horizontal Errors (RMSEr) for Lidar Data in Terms of
Flying Altitude
Altitude
(m)
Positional RMSE
r
(cm)
Altitude
(m)
Positional RMSE
r
(cm)
500
13.1
3,000
41.6
1,000
17.5
3,500
48.0
1,500
23.0
4,000
54.5
2,000
29.0
4,500
61.1
2,500
35.2
5,000
67.6
Although the new standard did not provide a specific equation
to estimate the horizontal accuracy of elevation data derived
from IFSAR, in my opinion, the above set of equations can
safely be used for such purpose despite the different natures
of the two technologies. Errors from sensor orientation angles
determination, sensor positioning, and flying altitude are
the major contributors to errors in the resulting products
from these two different technologies assuming that both
the LiDAR and IFSAR sensors are well manufactured, well
calibrated, and the data were processed correctly.
0.55894170
0.55894170
V
ertical
A
ccuracy
R
equirements
for
E
levation
D
ata
The new standards changes the way we classify terrain
categories by recognizing only two categories. In situations
where the ground surface is not obscured by vegetation or
manmade features, the new standard refers to such category
as “Non Vegetated” terrain and whenever the terrain surface
details are obscured by any feature, the new standard refers
to such category as “Vegetated” terrain. Such categorization
simplifies the way we deal with the elevation data and
represents a departure from the lengthily and sometime
meaningless categories used in the past. Similar to the
“such changes in the mapping process
deemed all previous legacy map
accuracy standards such as ASPRS
Map Accuracy Standard of 1990 and
the National Map Accuracy Standard
(NMAS) obsolete and unable to
represent today’s more sophisticated
mapping processes and products”
measure used for the horizontal accuracy classes, the new
standard measures vertical accuracy in term of Root Mean
Squares Error (RMSE) for non-vegetated terrain but uses 95%
percentile for vegetated terrain due to the nature of random
errors distribution for each case. Table 3 provides the vertical
accuracy classes naming convention for any digital elevation
data.
As it is the case with the horizontal accuracy classes,
by not limiting the classes to a certain ranking or certain
number of classes, the new standard offers great flexibility in
accommodating any accuracy level obtained from current or
future sensor technologies.
The Non-vegetated Vertical Accuracy at the 95% confidence
level in non-vegetated terrain (NVA) is computed by
multiplying the accuracy value of the Vertical Accuracy Class
(or RMSEz) by 1.9600 while the Vegetated Vertical Accuracy
(VVA) at the 95% confidence level in vegetated terrain is
computed as the 95th percentile of the absolute value of
vertical errors which is approximated to equal or less than 3.0
times the accuracy value of the Vertical Accuracy Class (or
RMSEz). The new accuracy term, VVA, refers to all vegetated
land cover categories combined, including tall weeds and
crops, brush lands, and fully forested areas.
The new standard provides examples on vertical accuracy


