(least-squares) were evaluated in Lingua
et al.
(2009) for
DSM
generation. The images were acquired with an off-the-shelf
visible light camera.
Progress related to machine learning-based techniques for
DSMs
generation has reinforced its use for images acquired
from
UAVs
(Rosnell
et al.
2011).
Virtual reality is another issue closely related to pho-
togrammetry. In this way, Linkugel and Schilling (2013)
proposed a simulation system where a micro-
UAV
is used
for computing 3
D
measures for virtual reality purposes. The
mathematical model was described, including all aerodynam-
ic parameters of the
UAV
toward the definition of the geomet-
ric modeling based on different sensors.
Digital elevation models and 3
D
mapping with
DSM
or
DTM
production together with mosaicking with geo- and ortho-
rectification are two main topics inside photogrammetry;
both are considered separated here, although they are closely
related.
3D Mapping, Digital Surface, Elevation, and Terrain Models
Nex and Remondino (2014) and Remondino
et al.
(2011)
provided a review with new insights and proposal for differ-
ent photogrammetry-based applications, including 3
D
digital
terrain or 3
D
textured models. Photogrammetric approaches, in-
cluding topographic maps with slopes, have been described in
Tahar
et al.
(2011 and 2012) oriented to landslides applications.
Hugenholtz
et al.
(2013) evaluated the accuracy in
DTM
production using a fixed-wing
UAV
that weighs less than 6.2 kg
and equipped with an off-the-shelf
CCD
-based visible camera.
Different works have been proposed for 3
D
model genera-
tion. In this regard, point cloud generation is a task of interest
for 3
D
mapping accuracy, a procedure for such a purpose was
proposed in Rosnell and Honkavaara (2012) with two
RGB
-
based digital still
CCD
-cameras. Two quad-copters were used,
which were able to carry 300 g and 1.2 kg payload, equipped
with cameras weighing 180 g and 448 g, respectively.
Neitzel
et al.
(2011) used an octo-copter (1.2 kg net weight
or
TOW
2 kg with camera) for 3
D
mapping landfills with the
aim of determining its volume and quantity based on point
cloud computation. 3
D
building models are obtained in Jizhou
et al.
(2004) using a fixed-wing
UAV
equipped with a
CCD
-based
camera. They captured oblique images to obtain relevant parts
of buildings instead of using a pair of images as usual.
Harwin and Lucieer (2012a and 2012b) applied multi-
view stereovision (
MVS
) techniques to obtain 3
D
structure
from overlapping imagery captured from multiple angles. An
octo-copter with approximate payload limit of 1 kg is the
UAV
used. It was equipped with a stabilized camera mount to carry
different sensors, including a commercial digital camera. A
very dense point cloud was produced with sufficient accura-
cy. Accuracy is a central issue in photogrammetry as reported
in Küng
et al.
(2011
a
) and Vallet
et al.
(2011), where different
experiments have been carried out with light
UAVs
, weighing
less than 500 g with maximum payload of 125 g. Different
methods and strategies for point cloud generation from digital
images captured with
UAVs
flying at relatively low altitudes
were also addressed in Siebert and Teizer (2014) for 3
D
map-
ping in mapping earthwork projects.
Regarding digital surface models, a laser scanner, two
CCD
-
based digital cameras (with weights of 500 g each) and two
infrared devices (
NIR
sensitivity with 500 g) were integrated
together with an
IMU
and
GPS
in Nagai
et al.
(2009) for such a
purpose. A 3
D
shape is obtained by the laser scanner as point
cloud data, texture information is acquired by the digital cam-
eras, and vegetation indexes are acquired by the
IR
cameras
simultaneously. The
UAV
is a helicopter with weight of 330 kg
and payload of 100 kg with two main rotors (4.8 m diameter)
and two tail rotors (diameter of 0.8 m).
High-resolution surface models are possible by using
UAVs
flying at low altitudes. Mancini
et al.
(2013) developed a
method based on
SfM
to build such models in unstructured
coastal environments. An electric hexacopter was the
UAV
used, with a 1 m diameter and total weight of approximately
5 kg, and equipped with a digital camera. Walker (2012) also
addressed the topic of coastal management applications.
In Delacourt
et al.
(2009)
DEMs
and orthorectified images,
acquired from and helicopter, are built with high spatial
resolutions (<5 cm). The system was tested on the beach of
Porsmillin (French Brittany) for the quantification of morpho-
sedimentary changes of the coastal fringe, including cross-
shore and long-shore sediment transport.
Imagery change detection techniques for topographical
reconstruction were applied in Xuan (2011), where
DSMs
were built from the remotely sensed data based on different
techniques, including: triangulation,
DEM
generation, ortho-
imaging, and mosaicking. Two types of
UAVs
were used: (a)
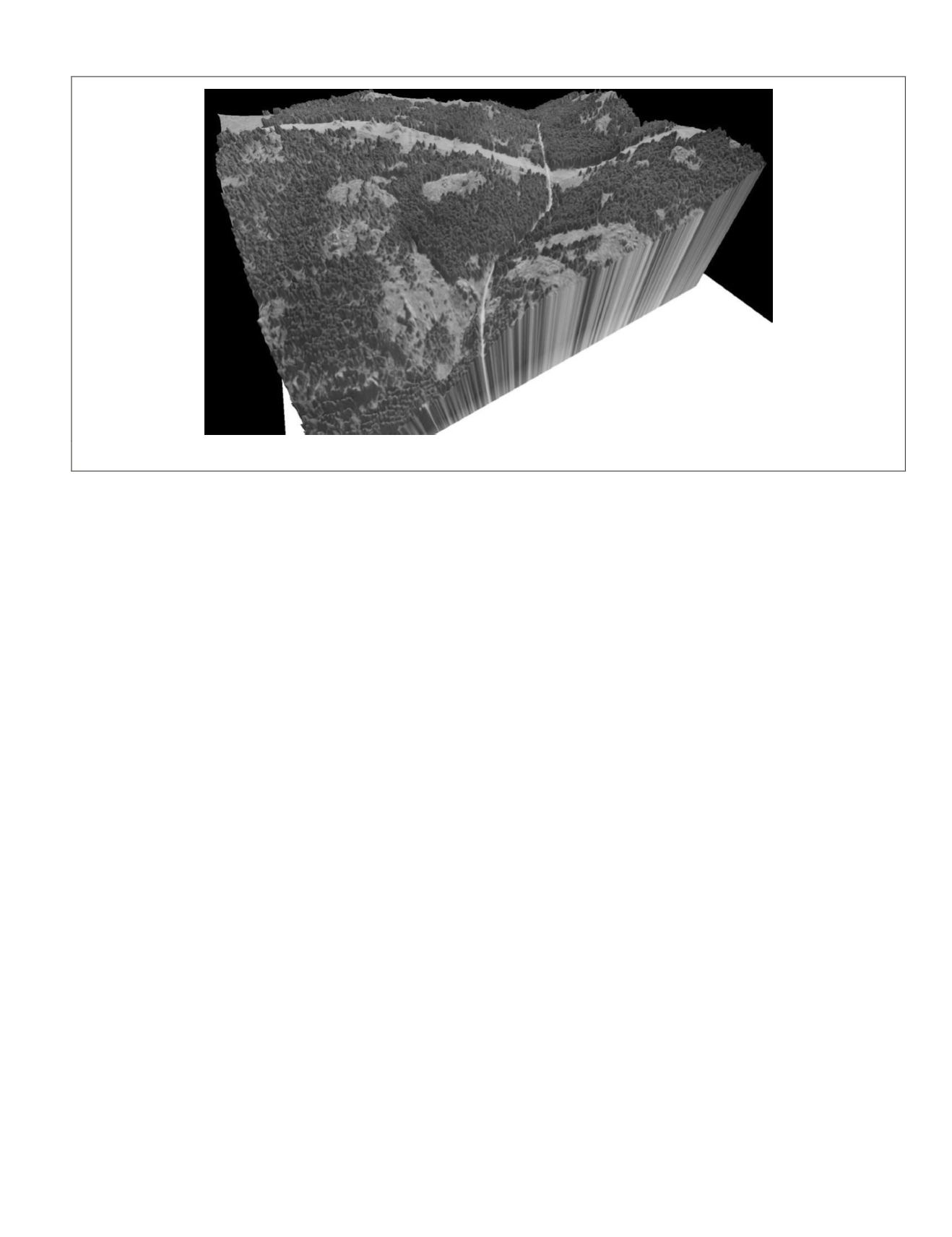
Figure 10. Digital Surface Model built from images captured with a visible light camera (Image courtesy of QuantaLab-
ias
-
csic
, Cordoba, Spain).
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
April 2015
305


