applications where
UAVs
are used for spraying chemicals on
crops controlled by a
WSN
deployed on the crop field.
Samseemoung
et al.
(2012) designed a low altitude remote
sensing (
LARS
) helicopter, with 6 kg and payload capacity of 5
kg, equipped with a commercial true color camera (
RGB
) and
a color-infrared digital camera (
G-R-NIR
) for monitoring crop
growth and weed infestation in a soybean plantation flying at
altitudes up to 15 m. Also a
LARS
system based on a helicop-
ter, with weight of 6 kg and payload of 5 kg, equipped with
a multispectral imaging system was proposed in Swain
et al.
(2010) and Swain and Zaman (2012) to determine the crop rice
coverage with the aim of predicting rice yield for planning and
expectation. Bendig
et al.
(2013a and 2013b) obtained crop sur-
face models in rice fields based on stereo images with the aim
of analyzing crop growth and health status. The platform is an
octo-copter with payload of 1 kg equipped with a true color
RGB
sensor with a weight of 400 g. In the context of corn yield
prediction, Geipel
et al.
(2014) used a hexa-copter, equipped
with standard navigation sensors (
IMU
,
GNSS
) to acquire
RGB
imagery, which was later ortho-rectified with production of
DEMs
and maps leading to the computation of vegetation indi-
ces. Rice paddies were characterized in Uto
et al.
(2013) based
on a miniature hyperspectral system onboard an
UAV
.
Torres-Sanchez
et al.
(2013a, 2013b, and 2014), Peña-
Barragán
et al.
(2012a and 2012b), and Peña
et al.
(2013) used
a quad-copter, with payload of 1.25 kg, with a lightweight
700 g
CMOS
multispectral sensor with six individual digital
channels and sometimes a commercial high-resolution
RGB
true color camera. Both cameras can be installed separately
onboard for deriving vegetation indices for crop and weed
detection for generating weed coverage maps with the aim of
site-specific treatments in maize crops. The images, stored in
SD
and
CF
cards, are preprocessed for correct channel align-
ment suitable for accurate ortho-rectification and mosaicking
purposes before the map generation. A set of georeferenced
ground control points (
GCP
) is used for such purpose. Small
changes in flight altitudes can produce important differences
in the ortho-images resolutions. A study about accuracy in
wheat fields infested by broad-leaved and grass weeds was
carried out in Gómez-Candón
et al.
(2014), where precision
mapping for farm applications are built using a quad-copter
equipped with a device providing
CIR
images. Different
studies were conducted in Peña et al. (2015) quantifying the
efficacy and limitations of remote images acquired with an
UAV
for detection and discrimination of weeds affected by
the spectral, spatial and temporal resolutions. Crop pests and
monitoring for prevention and cure when infestation has oc-
curred were studied and addressed in Yue
et al.
(2012).
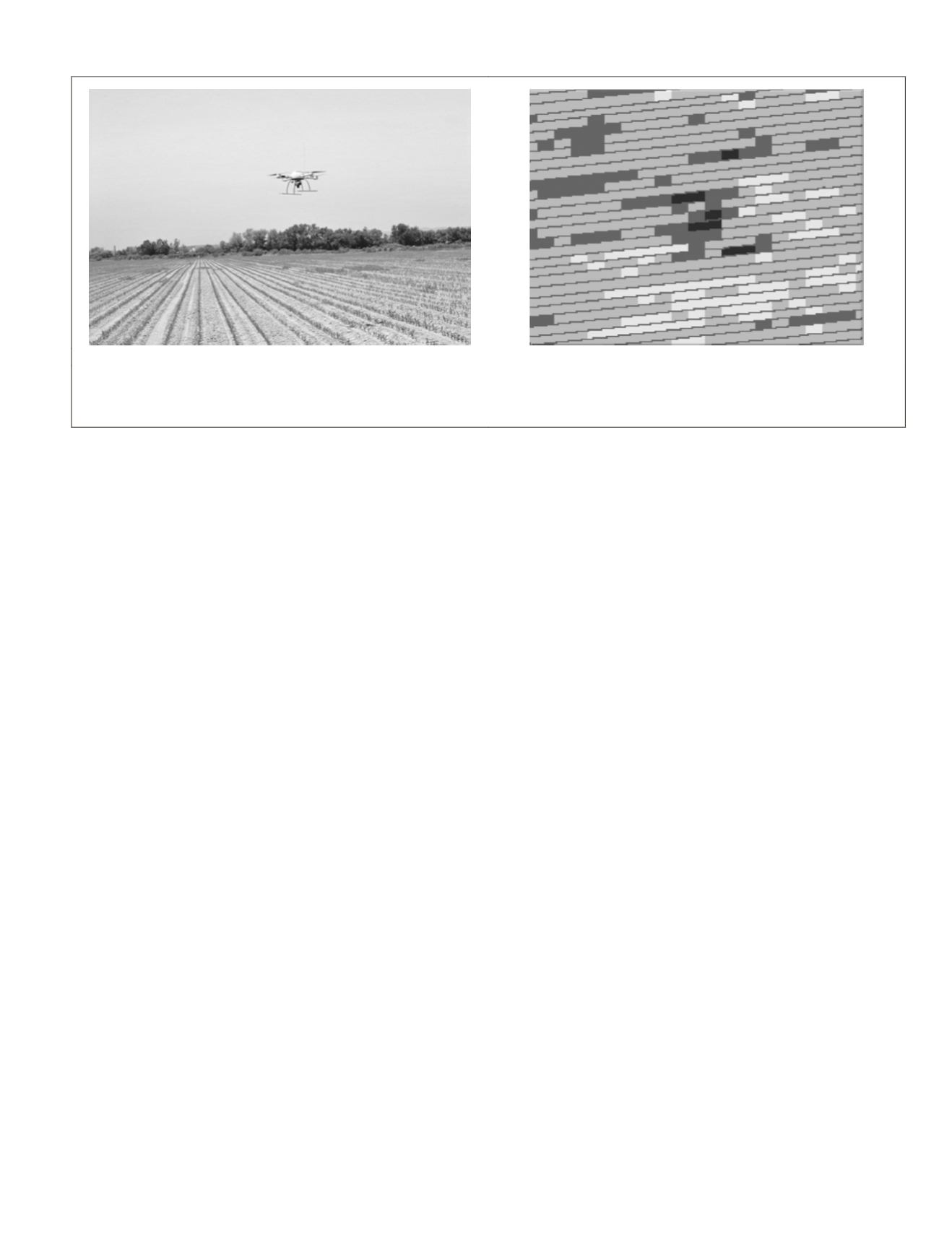
Figure 7a shows an
UAV
quad-rotor, from the Carto
UAV
(2015) company, flying a maize crop field to detect weed
patches in order to design site-specific herbicide treatments.
The images are conveniently mosaicked and segmented for
crop row identification and crop versus weeds discrimination
with the aim of building density maps of crops and weeds
coverage. Figure 7b shows a map obtained from
UAV
images
showing three levels of weed infestation (low, moderate, and
high, in an ascending greyscale), crop rows (in grey) and free-
weed zones (in white). The image displayed in Figure 7b is
adapted from Peña
et al.
(2013).
Honkavaara
et al.
(2013) used a multispectral system (see
the Multispectral and Hyperspectral Subsection) for biomass
estimation. Different vegetation densities in wheat and barley
crops were obtained according to the amounts of seeds and
fertilizers applied, which allowed for determination of the
effect of these quantities in the health and growth stage of
crops. Different experiments were also conducted by Jannoura
et al.
(2015) to monitor crop biomass based on
RGB
images
captured by a true color camera onboard a hexa-copter.
Rabatel
et al.
(2014a) proposed various methods to obtain
simultaneously visible and
NIR
bands for agricultural applica-
tions, including weed monitoring. Red (R) and
NIR
data were
obtained from a uniquely modified still camera, which was
achieved by removing the blocking internal
NIR
filter in the
camera, inserting a red long-pass filter in front of the lens and
getting Red and
NIR
as linear combinations of the raw channel
data. In a second system, in the context of the
RHEA
project
and its associated second conference (
RHEA
, 2015), R and
NIR
bands are obtained by a couple of compact still cameras, one
of them being modified as before. A specific image registration
procedure was developed for such purpose (Rabatel and Lab-
bé, 2014b). Aerial images of wheat were acquired by a camera
onboard the
UAV
from AirRobot (2015) company, Figure 2b, as
part of the activities in the
RHEA
project with the aim of pro-
ducing georeferenced maps for follow-up, site-specific treat-
ments in wheat fields. Hunt
et al.
(2010 and 2011) replaced
the internal hot-mirror filter with a red-light-blocking filter to
get data in the near-infrared, green, and blue bands, i.e.,
CIR
bands. Leaf area and green normalized difference vegetation
indices were correlated in fertilized wheat crops.
Aerial reflectance measurements were conducted in Link-
Dolezal
et al.
(2010 and 2012) in winter wheat for crop moni-
toring purposes based on georeferenced images. The
UAV
, with
(a)
(b)
Figure 7. (a)
uav
flying a maize crop field to detect weeds patches for site-specific herbicide treatments, and (b) Weed density map
obtained from
uav
images with three levels of weed infestation (Images courtesy of F. López-Granados and J.M. Peña, Institute for
Sustainable Agriculture,
csic
-Córdoba, Spain; adapted from Peña et al., 2013).
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
April 2015
295


