the rover by onboard lidar sensor(s). The rover is expected to
utilize lidar sensor(s) with a panoramic Field of View (
FOV
) to
image the geometry of tree stems around the rover.
The main hypotheses that guided the development of
the algorithm can be summarized as follows: (a) Northing
and Easting locations of tree stem centers can be estimated
by calculating the geometric centroid of crowns detected in
overhead imagery. In particular, the algorithm assumes that the
center of the tree crown coincides or is in close proximity to
the center of the stem. This implies that for the purposes of our
research, tree crowns are assumed to have an elliptical profile
in the horizontal plane, while tree stems are assumed to have
an upright vertical profile (Larsen, 1997); (b) Stem center loca-
tions at each pose relative to the rover can be calculated from
3
D
scans of tree stems surrounding the rover on the ground; (c)
Stem center geolocations extracted from aerial/orbital imagery
serve as the absolute dataset (constellation) that smaller tree
stems maps generated from lidar can be compared against; and
(d) Matching of 3
D
generated stem maps to the constellation
produces an estimate of the absolute geoposition of the rover
at each pose. It is noted that the accuracy of estimated tree cen-
ters depends on the view angle (perspective) of the image as
well as on the orthorectification accuracy. For best results and
to reduce the effect of parallax, the area of interest needs to be
close to the nadir of the image. In addition, orthorectification
should be based on forest canopy rather than ground.
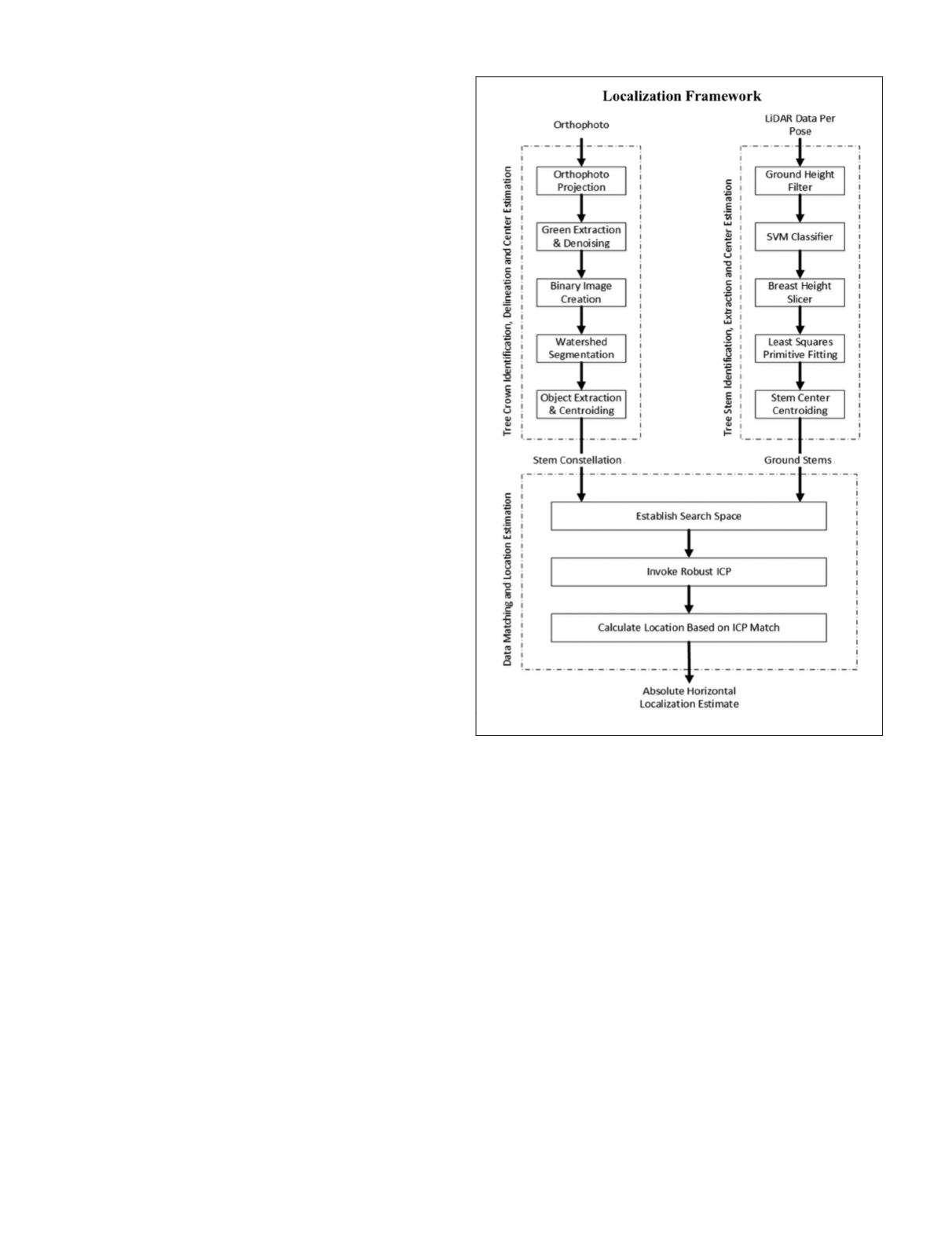
Figure 1 shows a detailed illustration of the major compo-
nents of the localization framework. The localization algo-
rithm is composed of three main components:
• Tree Crown Identification, Delineation and Center Estimation from
Overhead Imagery:
Delineates tree crowns, extracts their shapes and esti-
mates tree centers by calculating the geometric centroid.
• Tree Stem Identification, Extraction and Center Estimation from
Rover Lidar Data:
Identifies tree stems, extracts their 3
D
profile and esti-
mates stem center horizontal locations at a particular
height above ground.
• Matching of Tree Centers from Overhead Imagery and Lidar Data:
Estimates the rover’s horizontal geoposition by matching
tree center maps generated from lidar to a map obtained
from overhead imagery.
Tree Crown Identification, Delineation and Center Estimation
from Overhead Imagery
This component involves creating a map of the absolute
horizontal geopositions of tree stem centers extracted from a
high-resolution orthophoto of the forest canopy. The purpose
of the map is to serve as a constellation of reference for com-
parison to smaller local maps of tree stems observed by rover
based lidar data of the forest grounds. Our chosen scenario
assumes that the rover is equipped with a large orthophoto
library of the area to be explored and that this component of
the algorithm is executed once before mission execution and
stored for use whenever the
GPS
service is down.
Several automatic tree crown delineation algorithms have
been previously developed (Wang
et al.
, 2004). One particular
method suggested by Wang
et al.
utilizes a multi-step ap-
proach where Near Infra-Red (
NIR
) images of tree canopies are
processed to pinpoint crown centers by finding pixels with
the maximum intensity. They hypothesize that due to the ar-
rangement of tree leaves and branches at the top of the crown,
its apex will have the largest observed surface area and thus
will reflect radiation the most. The pixel with the highest in-
tensity is labeled and used by a marker-controlled watershed
segmentation algorithm (Bleau and Leon, 2000).
The watershed segmentation algorithm allows the
delineation of complex crown clusters to extract individual
tree crowns (Bleau and Leon, 2000). Although effective, this
approach was not entirely followed because it relies on
NIR
imagery that is not readily available. A variant of the method
was developed that uses visible imagery readily available from
Google Earth
™
.
The main hypothesis that guided the development of the
algorithm is the fact that the horizontal location of a tree cen-
ter in an overhead image can be estimated from the geometric
centroid of the delineated crown (conical trees). Therefore, if
a tree crown is detected and delineated, the location of a tree
center can be calculated with a horizontal accuracy limited by
the pixel resolution of the image. The following summarizes
the steps undertaken by the tree crown identification and
delineation algorithm:
1. The overhead orthoimage of the exploration area is
projected onto the correct reference system, if required.
2. The orthoimage is then processed to delineate and
extract individual tree crowns.
3. Tree stem center pixel locations in the image are de-
termined by calculating the locations of the geometric
centroids of each detected crown.
4. Absolute horizontal geoposition of each tree stem cen-
ter is determined by indexing pixel locations given the
absolute geoposition of the four corners of the image.
Figure 1. Localization Framework Flow Chart.
840
November 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


