PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2018
753
BOOK
REVIEW
Reconstruction and
Analysis of 3D Scenes:
From Irregularly
Distributed 3D Points to
Object Classes
Martin Weinmann
Springer International Publishing AG.
2016. 233 pages, hardcover. ISBN
3319292447. $142.65 from Amazon.
Reviewed by
Ed Freeborn, CTO
Unmanned Experts
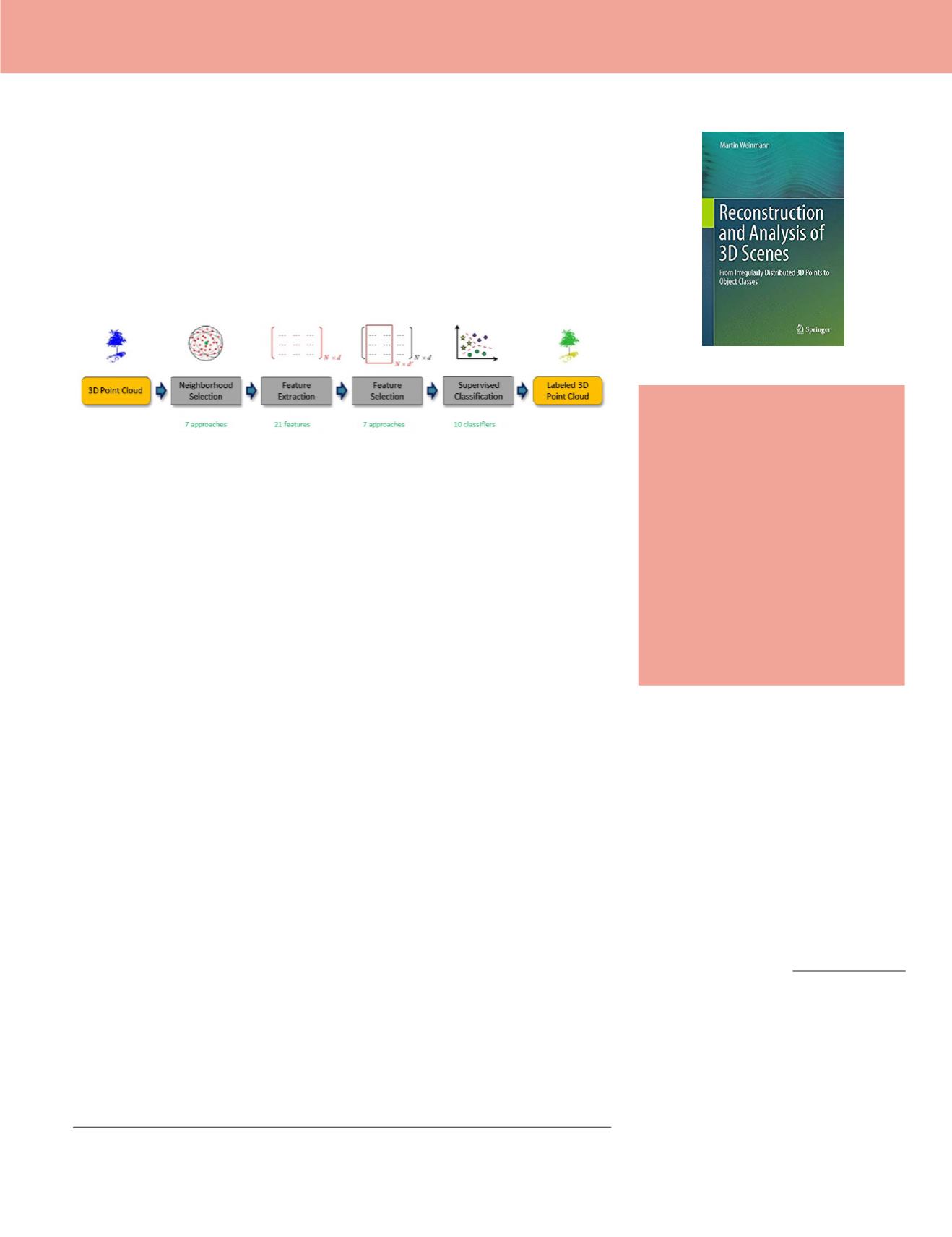
This research monograph introduces and describes the author’s framework for ful-
ly automated processing and analysis of point clouds focusing on general applica-
bility and a workflow spanning the processing of raw 3D point cloud data to the
production of semantic or classified objects in a scene (see Figure 1). This is done
in the context of an extensive review of fundamental elements of 2D and 3D data
processing and related work. The intended audience “includes a broad community
of people who are dealing with 3D point cloud processing, reaching from students
at undergraduate or graduate level to lecturers, practitioners and researchers in
photogrammetry, remote sensing, computer vision and robotics.”
1
After three introductory chapters,
Reconstruction
devotes a chapter to three fun-
damental problems in point cloud processing and closes with a chapter summa-
rizing conclusions and future work. Chapter 1 presents an overview of the work
and the book’s topics and structure. The chapters are intended to contain all the
book’s materials on a topic in one place and this structure supports the book’s use
as a reference or for tutorial study. Chapter 2 provides general definitions; passive
and active techniques for point cloud data generation; range and intensity image
representations of point clouds; and point quality assessment. Chapter 3 covers 2D
image and 3D point cloud feature extraction, including corresponding definitions
of features. Chapters 4, 5 and 6 cover three crucial point cloud processing tasks
respectively:
y
y
Chapter 4 — The combination of point clouds
y
y
Chapter 5 — Mapping complementary data acquired with different types of
sensors onto existing point clouds (e.g. thermal imagery onto a point cloud)
y
y
Chapter 6 — Automated interpretation of a point cloud scene in support of
semantic class labeling
Each of these chapters is structured to provide motivation for the work and the
author’s contributions to the task; related work in a short literature review; a tech-
nical explanation and theory of operation; experimental evaluation using bench-
mark datasets; discussion; conclusions and references. This chapter structure mir-
rors the overall summary of the book provided in Chapter 1, which, when combined
with the level of detail in the table of contents and a short but comprehensive
index, helps to make the body of work very accessible and useful as a reference..
The goal of the work reported in
Reconstruction and Analysis of 3D Scenes
, based
on Dr. Weinmann’s PhD thesis work, is to generate a semantically labeled point
cloud with a minimum of human intervention. While it is successful at achieving
this goal, it is similar to the long parade of airborne or satellite image processing
papers that we have all read over the past decades. They leave you saying, “Well,
if the author had just tried this,” or “I would have done it this way for what I need
to do.” One of the primary differences between those articles and the research
monograph/book format is the notion that Dr. Weinmann probably did try it this
way, or he did do it that way in
Reconstruction
, but if not, he probably considered
that option and tells you why he did not choose that option or path. He goes on to
1 Weinmann, M., 2016.
Reconstruction and Analysis of 3D Scenes
, p xi.
2
Reconstruction
, p144.
Figure 1
Reconstruction
, Figure 6.1, “The proposed framework for 3D scene analysis.”
2
Photogrammetric Engineering &
Remote Sensing
Vol. 84, No. 12,
December 2018, pp. 753–752.
0099-1112/18/753–752
© 2018 American Society for
Photogrammetry and Remote Sensing
doi: 10.14358/PERS.84.12.753


