orchards, always related with the photosynthesis (Zarco-Tejada
et al.
, 2013a and 2013b).
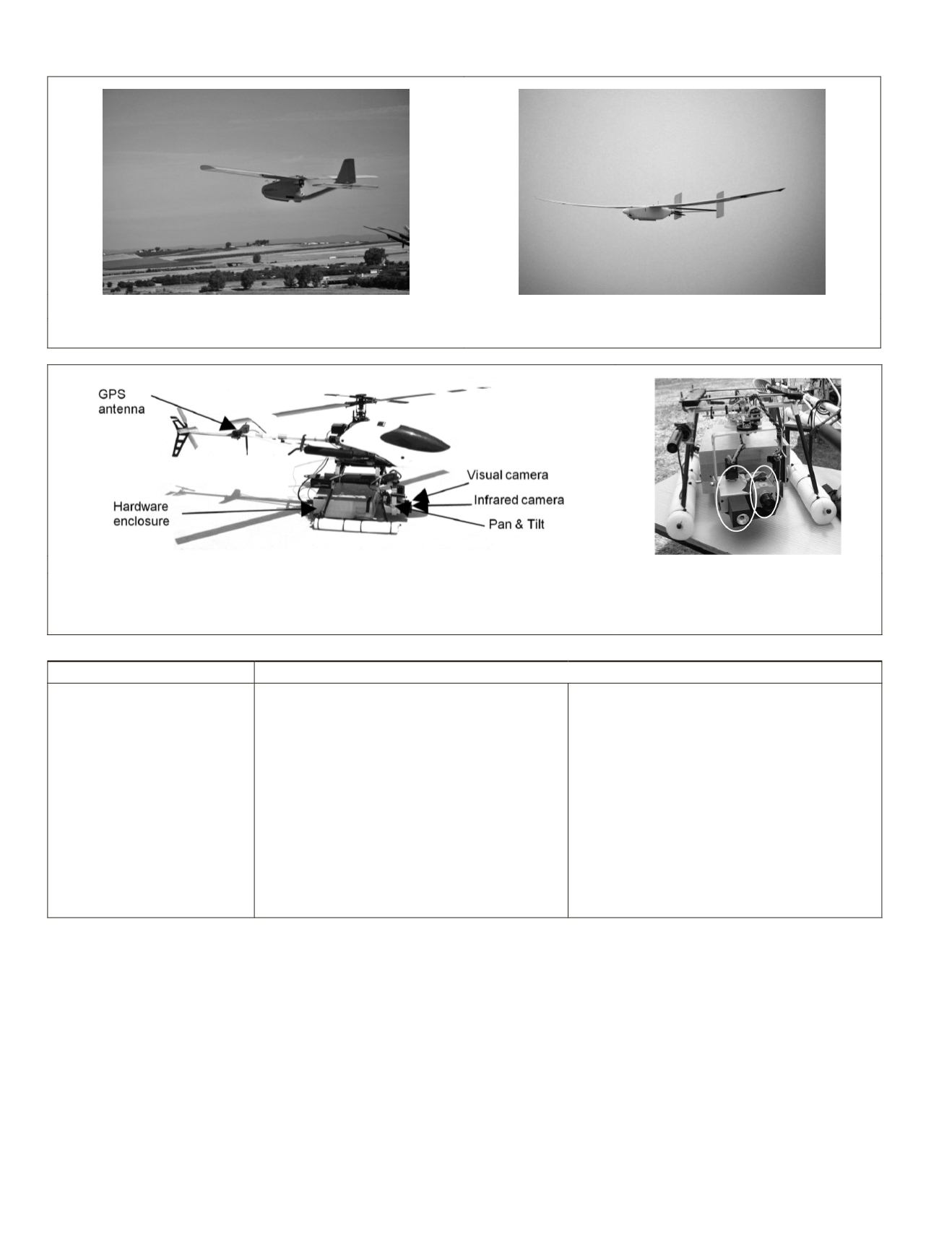
Figure 4a displays the helicopter
HERO
equipped with
GPS
,
and the sensor system consisting of visual and infrared cam-
eras installed on a pan and tilt unit, the hardware enclosure is
also displayed. Figure 4b displays the structure and detail of
the sensor system. (Images courtesy of J.R. Martínez-de-Dios
and A. Ollero; Robotics, Vision, and Control Group, University
of Seville, Seville, Spain). The
HERO
platform has been used
for early fire detection (Martínez-de-Dios
et al.
, 2007).
From the point of view of sensors onboard
UAVs
, payload
and logistic requirements are two important issues to be con-
sidered to ensure the success of remote sensing missions. The
smaller platform will be more limited for payload, directly
affecting the types of sensors that can be transported and thus
affecting the attributes of the remote sensing application.
However, an advantage is that small platforms require fewer
logistics, unlike larger platforms.
Payload limits onboard
UAVs
represent a handicap in the
use of sensors. Under this assumption new challenges appear:
the sensors must be adapted to the platform or vice versa.
Sensors onboard the platform should not be a serious im-
pediment for maneuverability. In this regard several research
subjects have been opened, where recent advances in
MEMS
are currently in continuous progress from the point of view of
systems engineering.
As reported in Dziubana
et al.
(2012) and previously in
Everaerts (2008),
UAVs
are equipped with different sensors
that can exceed twenty in number. Some of them are used
to capture data with the exclusive aim of controlling the
(a)
(b)
Figure 3.
uav
: (a) Cropsight, and (b) Viewer (Images courtesy of QuantaLab-
ias
-
csic
, Cordoba, Spain).
(a)
(b)
Figure 4. (a) Helicopter
hero
equipped with
gps
, visual and infrared cameras on the pan and tilt unit, and the required hardware, and (b)
Sensor system detail (Images courtesy of J.R. Martínez-de-Dios and A. Ollero; Robotics, Vision, and Control Group, University of Seville,
Seville Spain).
T
able
1. S
ensors
O
nboard
UAV
s
: A
uxiliary
and
S
pecific
Auxiliary
Specific
• GPS
• IMU
• Gyroscopes
• Accelerometers
• Altimeters
• Video stabilizer
• Image transmitter
• Communication antennas
• (VHF, UHF)
• Communication modems
• Video cameras (visible spectrum): EOS,
stereoscopic, omnidirectional, fish eye lens.
• Thermal cameras
• Infrared cameras
• FLIR
• LIDAR (Laser scanner)
• Multi-Hyperspectral (HyperUAS)
• Irradiance
• Radar/SAR
• Radiometer (multi-frequency)
• Infrared spectroscopy
• Electronic nose
• VCSEL
• WMS
• Ultraviolet spectrometer
• Multi-gas detector
• Sonar
• Smartphone
• Particle counters (optical, condensation)
• Photometer, aethalometer
• Aerosol sampling
• Probes (temperature, humidity, pressure)
• Cloud droplet spectrometer
• Pyranometer
• Electrostatic collector
• Radiation gauge
• Magnetic sensor
• Ultraviolet flame detector
• Gas/smoke detector
284
April 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


