increase the reliability of the team where identification among
the units plays an important role (Heredia
et al.
, 2009). Col-
laboration of multiple
UAVs
allows for data sharing, including
images between the different vehicles (Quaritsch
et al.
, 2011).
In order to improve performance in remote sensing mis-
sions, an important issue concerning collaboration between
UAVs
consists of the anticipation of anomalies in some units
within the fleet. Bethke
et al.
(2008) proposed a method to deal
with these effects under the framework of multi-agent systems.
Cooperative visual perception, from heterogeneous multi-
UAVs
, was soon identified as useful because of its potential
in visual perception tasks (Merino
et al.
2006a and 2007). A
fleet of heterogeneous
UAVs
(one airship and two helicopters),
equipped with various sensors (infrared, visual cameras, and
fire detectors), cooperate in automatic forest fire detection and
localization tasks using a distributed architecture based on
the blackboard communication system (BBCS). Research has
pointed out that heterogeneity increases the complexity of
the problem, but also provides several advantages such as the
possibility to exploit the complementarities of different
UAV
platforms with different mobility attributes and also different
sensor and perception functionalities. Merino
et al.
(2015)
proposed a decision and control architecture for multi-
UAVs
teams in forest firefighting. Different techniques derived from
infrared and visual imagery were applied.
A fleet of
UAVs
is proposed in Jensen
et al.
(2009) under
the assumption that redundancy and distributed information
are more profitable. The
UAV
fleet is used for measuring wind
speeds and acquiring data for 3
D
photogrammetry.
Zheng-Jie and Wei (2013) proposed a strategy to achieve
maximum coverage in surveillance missions when multiple
UAVs
are involved. In this way, Cook
et al.
(2013) proposed a
control learning-based strategy for target tracking in urban areas,
where the goal is to achieve maximum coverage with three
UAVs
.
Motion estimation and relative displacements between
several
UAVs
in collaboration also represents a challenge. Im-
age matching, with blob-based and estimation of homography
between images obtained from different
UAVs
was addressed
in Merino
et al.
(2006
b
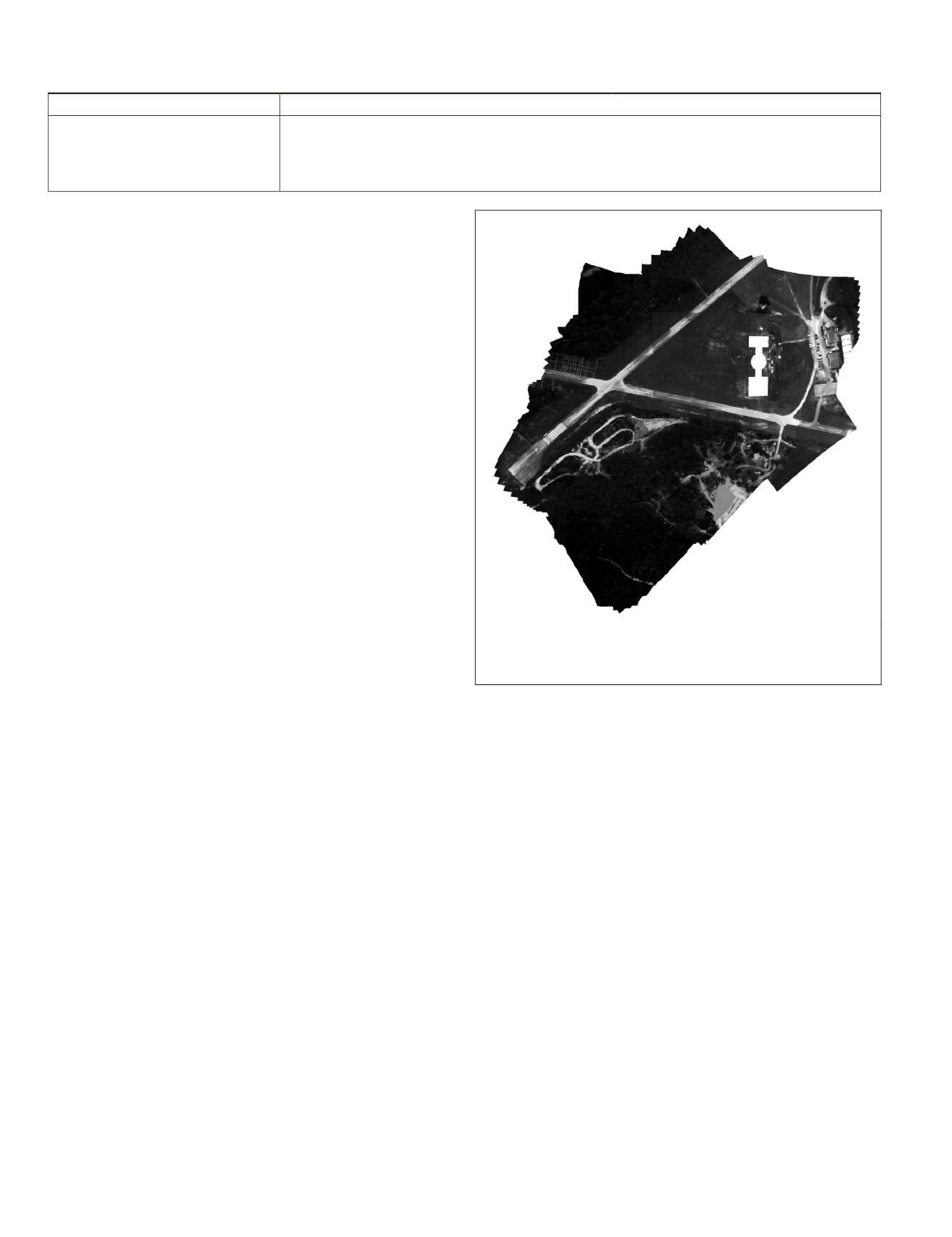
). The images are aligned by reducing
the global alignment error leading to a refined homography re-
sulting in a mosaic built with more than five hundred images
acquired from different
UAVs
. Figure 5, adapted from Merino
et al.
(2006b), displays a mosaic obtained by the method de-
scribed by the authors.
A cooperative
UAVs
-based system for monitoring and tracking
forest fires was explored in Casbeer
et al.
(2005 and 2006). Coop-
eration for surveillance in fire detection with a fleet of three het-
erogeneous
UAVs
was studied in Martínez-de-Dios
et al.
(2007).
Multi-
UAVs
systems are designed, as appropriate, for rapid
intervention when the remote sensing task is urgent. Han
et
al.
(2013) proposed this type of systems for nuclear radiation
detection, where two scenarios are simulated with the aim of
mapping the contour of actuation.
Sinha
et al.
(2009) tested a coordinated strategy for track-
ing a contaminant cloud in urban environments where multi-
UAVs
work together under a simulated scenario.
Mase (2013) proposed the cooperation of electrical and fueled
(gas, oil) vehicles to cover non-overlapped areas in disasters.
Cooperation and collaboration is not only limited to air ve-
hicles themselves, but can also involve other types of vehicles
such as ground or marine. Here, distributed architecture
becomes again critical for resolving conflicts, tasks allocation,
and their distribution or sensor data fusion coming from all
vehicles or systems. Maza
et al.
(2011) proposed a distributed
architecture for autonomous cooperation involving
UAVs
, wire-
less sensor/actuator networks, and ground camera networks.
Murphy
et al.
(2008) used aerial and sea surface vehicles
in cooperation for monitoring and analysis disaster for the
Hurricane Wilma.
Based on simulation and statistical analysis, Lanillos
et al.
(2014) studied the advantages of using the expected observa-
tion heuristic in multi-vehicle coordination for search. Coor-
dination of a team of autonomous sensor platforms search-
ing for lost targets under uncertainty is studied. A real-time
receding horizon controller was developed in continuous
action space based on a decentralized gradient-based optimi-
zation algorithm and by using the expected observation as an
estimate of future returns, which is an estimate of the possible
cumulative rewards that are obtainable in the future.
A team of
UAVs
is used for patrolling and surveillance of a
network of roads in Las Fargeas
et al.
(2015). A cooperative
surveillance task is formulated as a NP-hard problem based on a
heuristic approach analyzed with completeness and complexity.
The cooperation between
UAVs
and
UGVs
(Tokekar
et al.
,
2013) and
USVs
also becomes an important challenge; Figure
6a displays a quad-rotor onboard a patented landing platform
(Cruz
et al.
, 2015), specifically designed for precise approxi-
mation with full orientation during the landing operation,
two
USVs
and the
UAV
are all in cooperation for search and
T
able
2. C
ollaboration
: S
trategies
and
A
pplications
Strategies
Applications
• Distributed architectures
• Multi-agent systems
• Data fusion
• Multiple UAVs
• UAVs/USVs in collaboration
• Surveillance
• Visual perception
• Tracking (ground mobile units, contaminant clouds)
• Fire (prevention, detection, tracking, extinguishing)
• Search and rescue
• Wireless sensor distribution
• Nuclear radiation detection (simulation)
• Disaster monitoring
Figure 5. Mosaic built with more than five hundred images from dif-
ferent
uav
s (Image courtesy of J.R. Martínez-de-Dios and A. Ollero;
Robotics, Vision, and Control Group, University of Seville, Spain).
292
April 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


