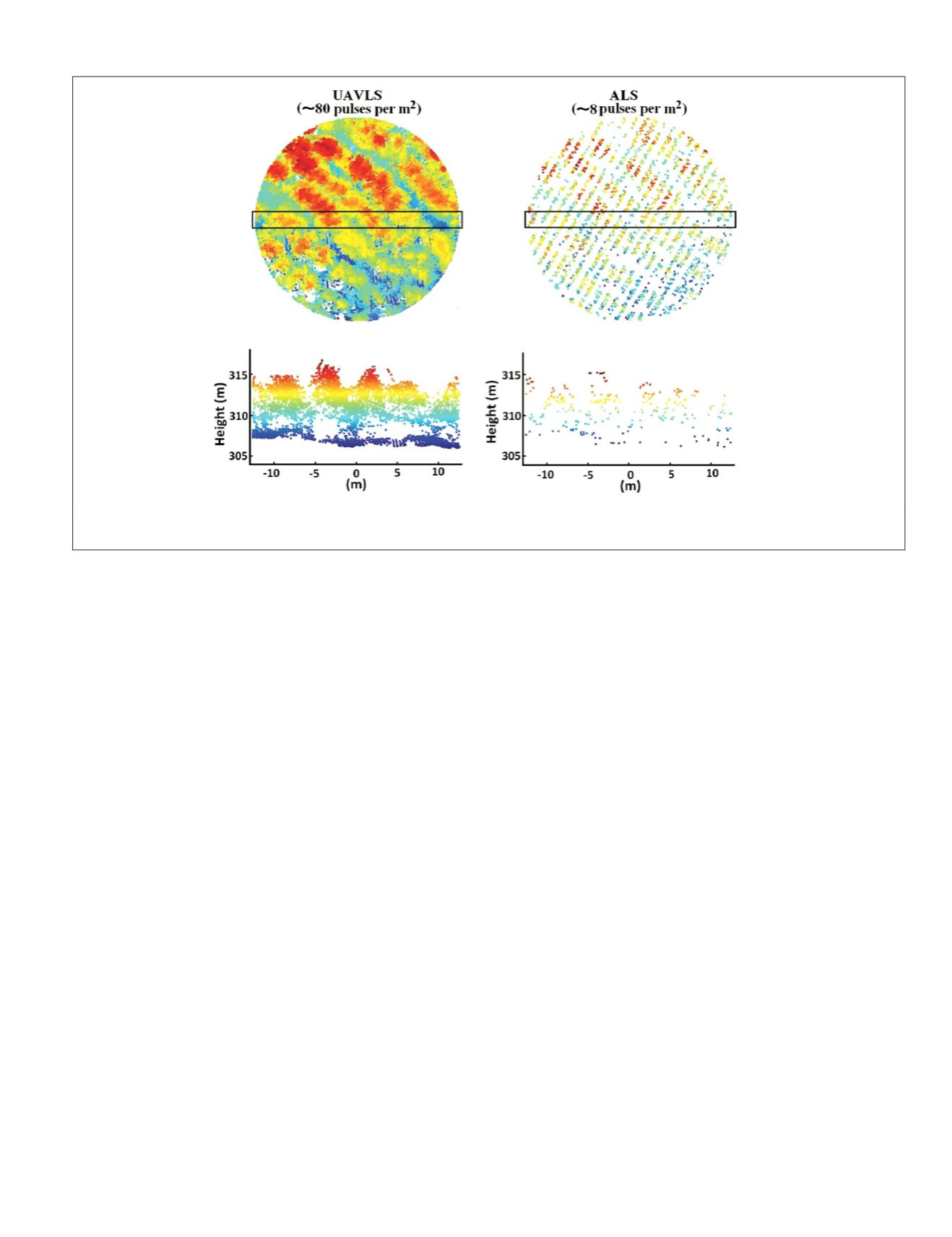
Plate 2 displays data captured at 40 m from an
UAV
above
ground level (
AGL
). The airborne laser scanning (ALS) data
was captured with an Airborne Laser Terrain Mapper (ALTM)
Gemini laser scanner with a pulse rate frequency of 70 kHz and
an on ground laser footprint of 0.2 m. The plot is in a forestry
plantation, close to Geeveston in southeast Tasmania, Australia.
Multispectral and Hyperspectral Sensors
Multispectral and hyperspectral sensors have been widely
used in
UAVs
-based applications for multiple purposes. The
difference between these sensors and others is the number of
spectral bands and the wavelength range covered, including
the visible spectrum. As hyperspectral sensors are based on
line scanning through the movement of the
UAV
, they require
sufficient stabilization to build coherent images. Sometimes
these systems require geometric correction using specific fea-
tures and ground control points (Jensen
et al.
, 2009 and 2011).
Multispectral sensors are non-scanning, and they, in general,
provide lower image resolutions compared to hyperspectral
sensors. Ren
et al.
(2013) presented a strategy for spectral re-
calibration (spectral response function, central wavelength, and
bandwidth) using man-made ground targets. The
CCD
-based
camera with four channels (blue: 420 nm–520 nm; green: 520
nm–600 nm; red: 630 nm–690 nm;
NIR
: 760 nm–900 nm) was
mounted onboard an
UAV
with the targets on the ground surface.
Multispectral and hyperspectral sensors are often used
together with other sensors with proven high performance to
increase the remote sensing capabilities of the
UAV
. Colomina
and Molina (2014) provided two lists of representative multi-
and hyper-spectral sensors.
Achteren
et al.
(2007) described the
MEDUSA
multispectral
instrument, ranging in 400 nm - 650 nm with weight of 2 kg
and two frame sensors (panchromatic and
RGB
), designed to
be installed in a high altitude, long endurance
UAV
.
Jensen
et al.
(2008) used two multispectral cameras, cover-
ing the visible and
NIR
spectral bands, installed onboard a
fixed wing
UAV
, with wingspan of 122 cm and weight of 454 g,
for georeferencing.
Bendig
et al.
(2012) equipped a mini octo-copter (<5 kg
and payload between 0.2 to 1.5 kg) with a multispectral
system consisting in a multiple camera array (
MCA
) sensor
with a total weight of about 720 g and mechanical trigger. It
contains four arrays with spectral filters of 550, 671, 800, and
950 nm corresponding to the green and red visible bands and
two bands of
NIR
. It was used together with a thermal system
previously described.
Honkavaara
et al.
(2013) used and described a multispec-
tral camera developed by the Technical Research Center of
Finland based on a Fabry-Perot interferometer with the capa-
bility of selecting different spectral bands with wavelengths
ranging in 400 nm - 1000 nm. The full system is also equipped
with irradiance sensors to measure different levels of this
magnitude together with a
GPS
. The above interferometer was
previously described in Saari
et al.
(2011) and Mäkynen
et
al.
(2011). Different tests conducted by Nackaerts
et al.
(2010)
and Honkavaara
et al.
(2012) demonstrated its performance
for
UAVs
, including the processing for radiometric corrections
(Honkavara
et al.
, 2012) and considering irradiance values
(Hakala
et al.
, 2013). This system was also used in Pölönen
et
al.
(2012) for precision agriculture and Kaivosoja
et al.
(2013)
for building raster maps for a precision fertilizer application.
Mäkeläinen
et al.
(2013) described the use of a 2
D
frame
camera operating in the
RGB
and
NIR
for orthomosaicking and
DEM
production. It is built with a
CMOS
-based technology and
based on the Fabry-Perot interferometer.
Kelcey and Lucieer (2012a and 2012b) used a six-band
multispectral sensor, which is improved based on radiometric
and spatial correction techniques in order to achieve noise
reduction (based on dark offset imagery), sensor-based modi-
fication of incoming radiance (based on spatially/spectrally
dependent correction factors), and lens distortion (through
the Brown-Conrady Model). These corrections improved the
quality of the raw multispectral imagery, facilitating subse-
quent quantitative image analysis.
Duan
et al.
(2013) evaluated the in-flight performance in
terms of signal-to-noise ratio of a new hyperspectral sensor
Plate 2. Data captured with an
altm
Gemini laser scanner onboard an
uav
: vertical view and profiles (Image courtesy of Luke Wallace and
Arko Lucieer, University of Tasmania, Australia).
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
April 2015
287


