Feature Type Selection
Texture is an important spatial feature used to characterize
objects or regions of interest in an image particularly for im-
age segmentation applications. Spatial features are generated
for pixels by moving windows or elements on the image. In
addition to spatial features, spectral features that are extracted
based on spectral bands are used to discriminate the classes.
In the proposed method for clustering essence feature types
among “spatial and spectral” features based on semantic
reasons are selected. These feature types contain contrast, en-
ergy, entropy, homogeneity, correlation, dissimilarity, cluster
shade, average, variance, and Gabor features. The reasons for
choosing these feature types are presented in Table 1.
Spatial features contain two classes: (a) First order statistics
include mean, variance, entropy, skewness and kurtosis (Tou
and Gonzalez, 1974), and (b) Second order statistics that are
extracted from
GLCM
include contrast, correlation, homogene-
ity, energy, entropy, dissimilarity, mean, variance (Haralick
et
al.
, 1973), and cluster shade (Sengur
et al.
2008) that are pre-
sented in Equation 1, where
C(i,j)
is the
(i,j)
th
entry of normal-
ized
GLCM
of image and
N
g
is the number of gray level. Indeed,
GLCM
captures the Second
order gray-level information and
recognize the texture and is related to the human perception.
Clustershade
i M j M C i j
i
N
j
N
i
j
g
g
=
− + −
(
)
( )
= =
− −
∑∑
0 0
3
1
1
,
(1)
M i C i j M i C i j
i
i
N
j
N
j
i
N
j
N
g
g
g
g
=
×
( )
=
×
( )
= =
= =
− −
− −
∑∑
∑∑
0 0
0 0
1
1
1
1
,
,
;
In addition, Gabor features, Normalized Difference Veg-
etation Index (
NDVI
) and Normalized Difference Water Index
(
NDWI
) (Richards, 2013) are extracted from multispectral im-
ages. These two indices are obtained by Equation 2 where
NIR
,
G and R are near infrared, green, and red bands of multispec-
tral images, respectively:
NDVI
NIR R
NIR R
NDWI
G NIR
G NIR
= −
+
= −
+
,
(2)
Note that the
GLCM
assumes uniform distribution across
the window of interest unlike Gabor filter that uses a Gauss-
ian weighting distribution (Clausi and Deng, 2005). One of the
important features which have the best matching to human
vision system is “Gabor” feature. If its parameters are tuned
exactly, the performance of texture recognition will be very
good. Equation 3 is used to implement Gabor filter (
h(i ,j))
where,
f
is the frequency and
ϕ
is the direction of the function
and
g
(
i
,
j
) is a cover of this function with variances in each
direction (Tuceryan and Jain, 1998).
h i j
g i j
fi
g i j
j
,
, cos
,
,
exp .
( )
=
( )
+
(
) ( )
= −
+
i
j
i
2
0 5
2
2
2
2
Π ϕ
σ σ
(3)
According to above mentioned features, there will be a
large number of features (i.e., 227) for each pixel. The num-
ber of features for each pixel can be calculated by Equation
4 in which,
I
is the number of spectral index (set to 2),
E
is
the number of Gabor direction (set to 4),
F
is the number of
images (four spectral bands in addition to Pan image),
T
is the
number of spatial feature types (set to 9),
O
is the number of
GLCM
direction (set to 4), and
M
is the number of First Order
moment features (set to 5):
#Features=I + E×F + (T×O + M) × F
(4)
Candidate Selection
After selecting the feature types in the first step of the pro-
posed
FS
method in Figure 1, the appropriate direction for
each feature type in the second step is selected. It must be
noted that only the panchromatic image is used for selec-
tion of appropriate feature types. This is because the spatial
resolution of the panchromatic image is almost four times that
of the multispectral images. After model selection, clustering
will be done on the selected features that are generated on
both panchromatic and spectral images. After feature reduc-
tion, the number of
GLCM
direction is decreased to one (
O
set
to 1), the number of first order moment features is decreased
to two (
M
set to 2), and the number of Gabor directions is
decreased to one (
E
set to 1); therefore the number of features
after
FS
based on Equation 4, will be 62. In other words, after
applying the proposed features selection method, the number
of features is reduced from 227 to 62. Toward our features
reduction goal, the suitable direction for each feature type is
selected based on the procedure shown in Figure 2.
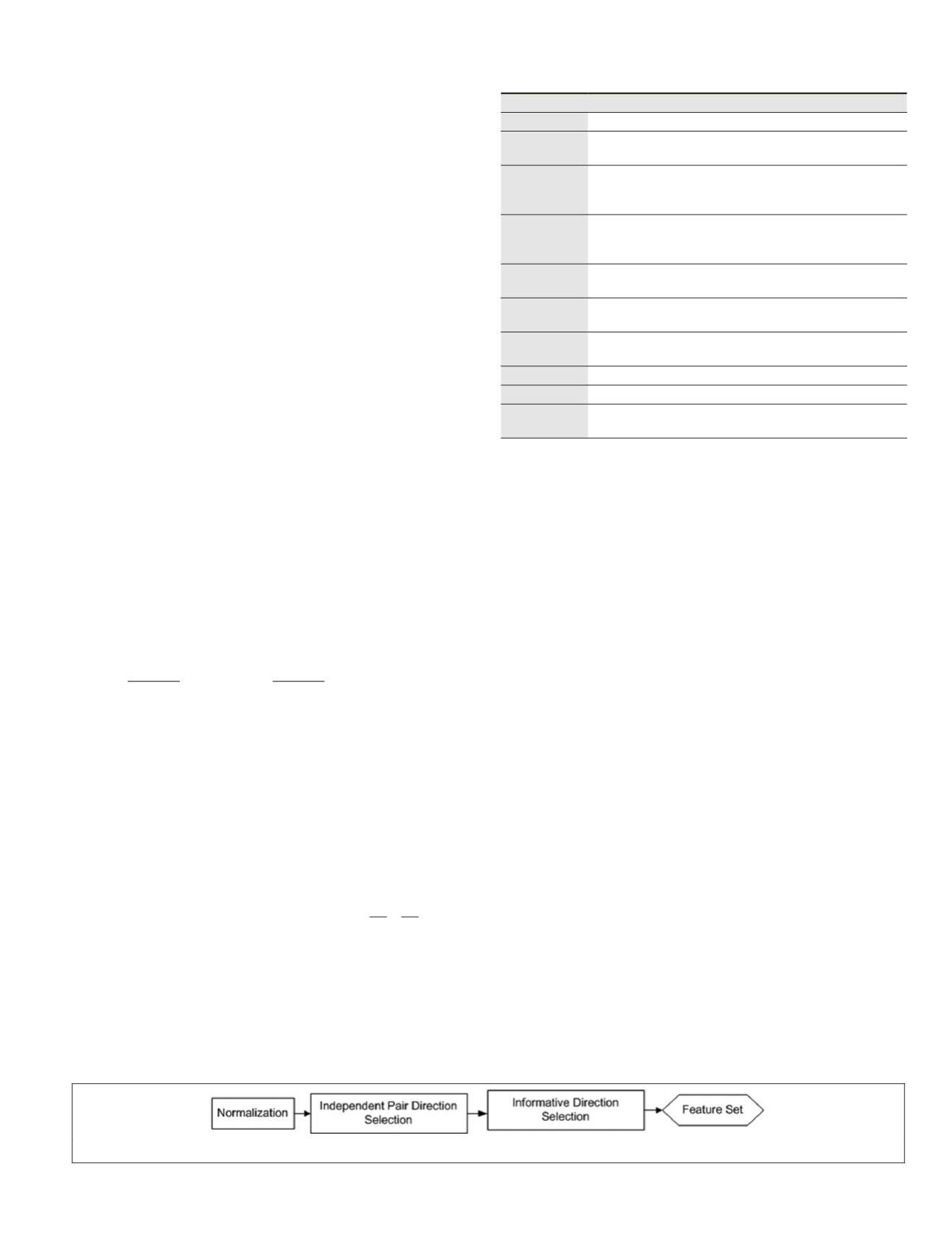
In the proposed procedure for selecting the best direc-
tion for each feature type, after feature vector normalization,
independent pair direction features (e.g., (0,45)) for both
GLCM
and Gabor features (called hereafter directional features) are
selected by using two criteria. In the second step, informative
direction between the selected pair is selected by using other
two criteria. In the following, these steps are explained.
Step 0: Normalization
Feature vector normalization before clustering is especially
needed for distance metric, such as Euclidian distance, which
are sensitive to differences in the magnitude or scales of the
attributes (Clausi and Deng, 2005). The Min-max normaliza-
tion method is utilized in this part.
Min-max normalization performs a linear transformation
on the original data based on Equation 5, where “
min
a
” and
Figure 2. The procedure for selecting the appropriate direction for each feature type.
T
able
1. T
he
R
easons
for
S
election
of
the
F
eature
T
ypes
Features
Reasons
Contrast
Represents the clarity of the textures.
Energy
Represents the uniformity of intensity distribution, so
energy of coarse texture is higher than fine texture.
Entropy
Measures histogram equalization and information in
the calculation window. If there is no texture in the
window, its entropy will be close to zero.
Homogeneity
Homogeneity of diagonal GLCM is bigger than other
states, and therefore homogeneity can be used for
checking similarity in the window.
Correlation
Measures the linear dependency between the gray
level pixels.
Variance
Measures the width of histogram and the deviation of
gray levels from mean of the histogram.
Dissimilarity
Represents changes in image geometry and intensity
and emphasize on shape feature.
Cluster shade Represent all edges in the image.
Average
Reduce noise and undesirable pixels in a window.
Gabor
Gabor features are the best matching to human vision
system that highlights edges in specific directions.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
March 2016
215


