used to place both the rope and the proposed front landing
gear object together in a single image from the same perspec-
tive.
CAD
models of both the front and rear landing gears were
created using measurements taken from the front and rear
landing gears of an extant Lockheed Electra 10E, construction
number 1042, and information from historical documents.
These
CAD
models were subsequently overlaid on histori-
cal photographs of the subject Lockheed Electra Model 10E
to verify visually that a good fit was obtained. A
CAD
model
overlay was then performed on mosaicked, still frame images
taken from the
ROV
video of each proposed landing gear. Both
mosaicked images contained a rope, and using the overlaid
CAD
models and the top-down view of the flat seabed as
references, the diameter of the rope was measured within
the
CAD
software SolidWorks. Separately, a piece of rope was
identified in the
ROV
video when a mechanical claw on the
ROV
grasped the rope. The dimensions of the mechanical claw
were measured and then used to estimate the diameter of the
rope. Finally, the diameter of the rope was compared between
all three sources of information, the proposed front landing
gear, the proposed rear landing gear, and the mechanical claw,
to assess whether all three measurements of the diameter of
the rope were consistent.
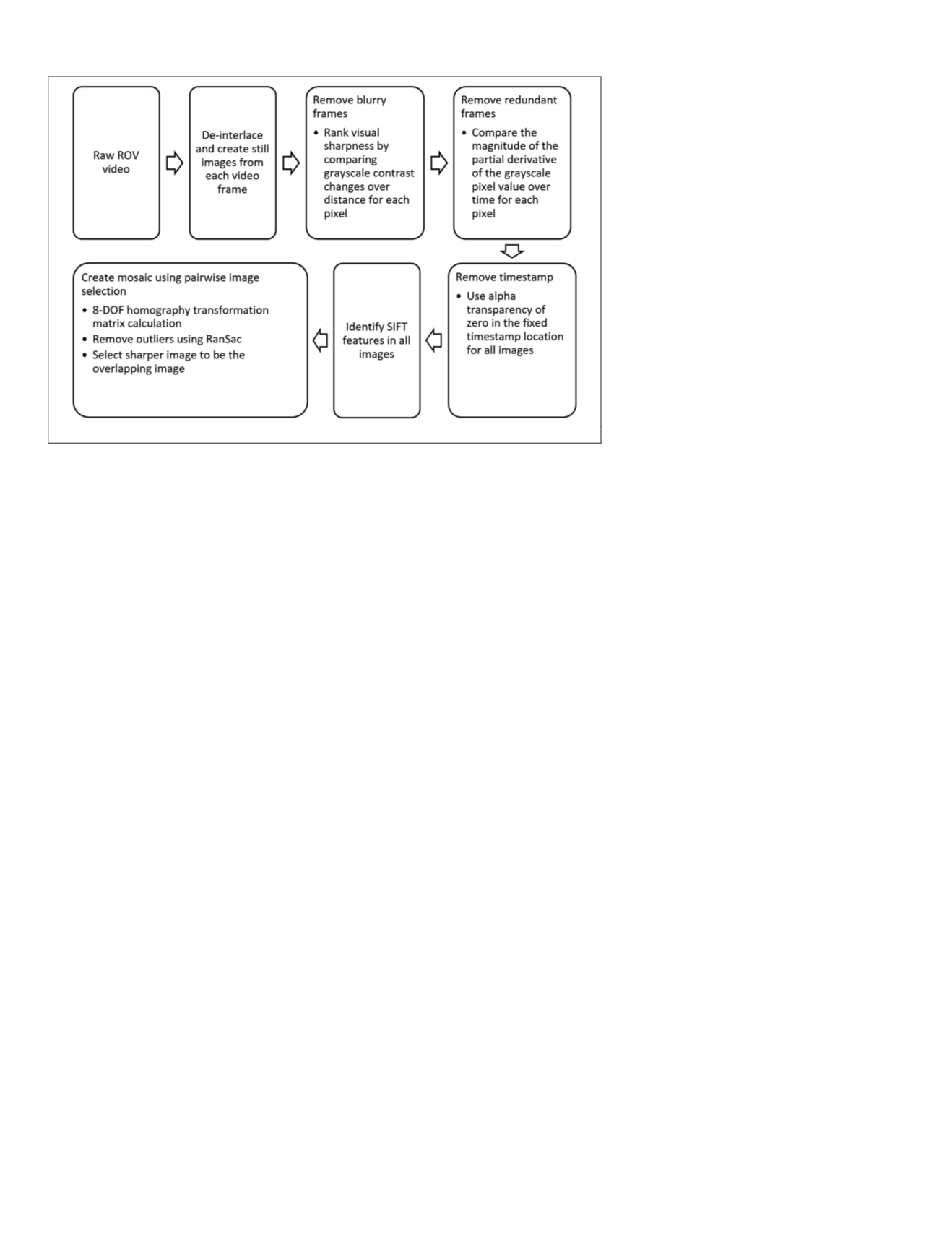
Figure 4 illustrates the overall video imaging and mosaick-
ing techniques utilized to create mosaics containing non-blurry
images from the video with the timestamp removed. These
steps will be described in more detail in the following sections.
Adaptive Sampling of the Video
The video that was the basis of the analysis was recorded
using a Sony FCBH11 high definition color block camera
in MPEG-4 codec using the BT.709
RGB
color space, with a
resolution of 1,440 × 1,080, 29.97 frames per second, and
a video bit rate of 55.7 megabits per second. The camera is
specified to have a focal length between 5.1 mm and 51.0 mm.
Although the focal length at the time of capture is unknown,
it was observed to constant during the video. The camera
path in the video was erratic, which is not uncommon during
underwater videography due to the ebb and flow of water and
the
ROV
, relative to a stationary scene. This causes a majority
of the video to be blurry or pointing in regions of no interest,
and is unusable for further analysis. On occasion, however,
the camera would temporarily be stationary during changes
in direction, such as the instance from ebb to flow, or have
extended stationary periods while it rested on the seabed.
These conditions, typical for
ROV
, neces-
sitated adaptive sampling of the video
to extract sharp still images for stitching
and analysis.
The images were first sampled ac-
cording to visual sharpness to remove
blurry frames. The pixels were convert-
ed to grayscale, and the grayscale pixel
values were compared with neighboring
pixels. For sharp images, changes in con-
trast are abrupt, which are identified by
large grayscale changes of neighboring
pixels. Conversely, blurry images have a
more gradual change in grayscale values
in regions of contrast changes. Thus, a
threshold value for the derivative of the
grayscale pixel value over pixel distance
was used to remove blurry images.
The sharp image dataset was then
sampled to remove redundant frames.
If the camera is stationary, the change
in pixel value over time is small. Thus,
stationary images can be removed by
calculating the magnitude of the partial
derivative of the grayscale pixel value
over time.
Combining Images (Video Mosaicking)
Using the sampled frames from the video, we began to con-
struct the debris field on the ocean floor. The composite image
was acquired by combining several still images using our cus-
tomized implementation of the auto-stitch algorithm (Brown
and Lowe, 2007). For this method to work properly either the
camera has to only rotate or the scene has to be planar. Since
the
ROV
changes position, we rely on the second assumption
that the scene, in this case the seabed, is roughly planar.
Local scale-invariant feature transform (
SIFT
) features in
all images were identified (Lowe, 2004). Timestamps were
present in every frame of the video, which created spurious
features during a subsequent matching step. Due to the time
stamp not occupying a fixed, real-world location, the pixel lo-
cations of the time stamp box were identified in every image,
and any
SIFT
features located within this box were removed.
The remaining features were saved per image. As adjacent
images were paired, corresponding features were loaded and
matched. Using the pixel coordinates of the matched features,
an eight degrees of freedom (8-
DOF
) homography matrix was
calculated using least squares error minimization. Outliers
were eliminated using Random Sample Consensus (
RanSaC
)
algorithm (Fischler and Bolles, 1981). Using the transforma-
tion matrix, the paired frames of the video were stitched, and
corresponding features were united. The stitched image and
the united features were saved to be used during the next
iteration. The overlapping regions of the stitched images
were determined by selecting the image which was visually
sharper. This was achieved by comparing the magnitude of
the gradient image and selecting the higher magnitude image
to lay on top of the lower magnitude image. The advantage
to this method of handling the overlapping regions is that it
minimizes error that is accumulated during each iteration due
to resampling. To improve the visual quality of the stitched
pairs, the time stamp region was modified to have an alpha
transparency of zero. When the images are stitched, this al-
lows for overlapping of non-time stamped pixels of one image
within the transparent region of the other image, thus filling
in regions containing a timestamp with scene data (Figure 5).
The pairwise
SIFT
matching, and transformation process is
inherently a parallel process, in which multiple pairs can be
stitched concurrently on different processor cores. Subsequent
Figure 4. Video processing and mosaicking techniques utilized.
226
March 2016
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


