unchanged pixels in the ground reference but detected as
changed in the change map.
We recorded the computing time of different methods to
evaluate the computational cost. In this study, all the experi-
ments are implemented based on Python 2.7 and
ENVI
5.1.
The change detection method based on the
SG
hybrid
ensemble system requires fewer parameters, but the key
parameter is the swarm size (
Z
) in the
FOA
, which was defined
in a set of comparative experiments. Another parameter is the
number of iterations (
num
), and it was set to 100 according
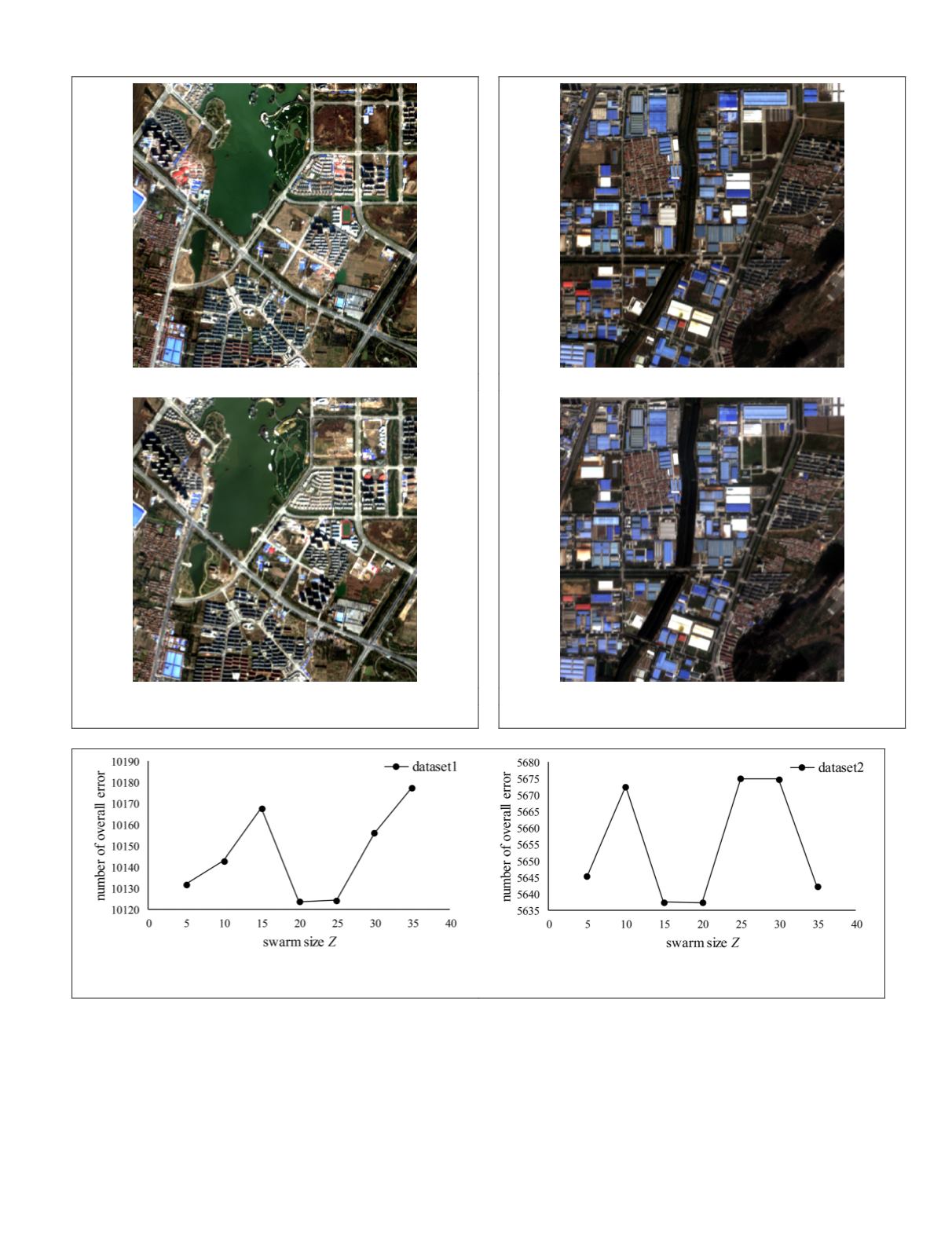
to the convergence of the algorithm. In the two experiments,
we set
Z
in the range of 5 to 35, and obtained the number of
pixels wrongly detected by
SG
with different swarm sizes. The
experimental results are shown in Figure 5. It can be observed
that, the number of wrongly detected pixels fluctuates be-
tween 10,120 and 10,180 in experiment 1 and between 5,635
and 5,680 in experiment 2 when the swarm size is between 5
and 35, and the gap between them is small, which indicates
(a)
(b)
Figure 3. True color images of the first dataset.
(a)
(b)
Figure 4. True color images of the second dataset.
(a)
(b)
Figure 5. The number of pixels wrongly detected by
SG
with different swarm sizes.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
November 2018
737


