The Universal Lidar Error Model
(Approved for Public Release: 15-144)
Craig Rodarmel, Mark Lee, John Gilbert, Ben Wilkinson, Henry Theiss, John Dolloff, and Christopher O’Neill
Abstract
Methods to adjust multiple lidar datasets, to adjust lidar with
other modalities, and to quantify lidar accuracy are limited.
While lidar sensor modeling, error propagation, and data
adjustment exist in literature, there are no known implemen-
tations supporting all three operations within existing file
formats and processing architectures. The Universal Lidar
Error Model (
ULEM
) has been developed to meet the commu-
nity’s need for rigorous error propagation and data adjust-
ment.
ULEM
exploitation allows one to develop predicted
error covariance at single points and full covariance among
multiple points. It defines a standardized set of adjustable
parameters, provides for the modeling and storage of correla-
tions and cross-correlations among parameters, and stores
the data within existing file formats. This paper provides
an introduction to
ULEM
, its metadata requirements, and its
model exploitation methods. It concludes with an example
of
ULEM
error modeling, showing the predicted uncertainty
agrees well with errors calculated from surveyed control.
Introduction
Airborne topographic lidar technology continues to mature.
As it does, the number of applications for the resultant data
also grows. Casual users of lidar data may be content to work
with the point cloud alone. However, for some applications
it is necessary to quantify the accuracy (or
uncertainty
) of the
lidar data and/or fuse the lidar data with other lidar datasets
and/or with image products, sometimes in the absence of
independent ground-coordinate check points. This necessi-
tates error propagation methods applied to an error model to
predict the lidar data uncertainty, or to weight the adjustable
parameters in a data fusion scenario. It also requires knowl-
edge of the correlations between the adjustable parameters
associated with the model(s). In many cases error models are
based on the physical properties of the sensor, although error
models may be based on sensor-approximating functions or
the direct error characteristics of the data product. For general
application, a sufficient lidar error model must support rigor-
ous error propagation and adjustability (
NGA
, 2011) to enable
the following geopositioning scenarios:
1. The absolute geolocation, and associated predicted
uncertainty, at a point.
2. The relative mensuration, and associated predicted
uncertainty, of a vector between an arbitrary pair of
points.
3. The simultaneous extraction of
n
points, and their
associated full (3
n
× 3
n
) ground covariance matrix, de-
scribing the full uncertainty relationship of a network
of points.
4. The simultaneous adjustment of lidar point clouds to
one another, or the extension of bundle adjustment to
simultaneously adjust any number of lidar point clouds
and image products using the solution of their associat-
ed vectors of adjustable parameters and full multi-prod-
uct (e.g., lidar and imagery) error covariance matrix.
For general lidar practitioners and users of lidar data, the
absolute uncertainties of Scenario 1 allow them to understand
the variability in lidar accuracy throughout the dataset. The
relative accuracies of Scenario 2 provide insight into the
uncertainties associated with distances or angles mensurated
from the point cloud data. The full error covariance of Sce-
nario 3 provides the
a priori
weighting required for rigorous
data adjustment/fusion of Scenario 4 where each dataset is
adjusted based on its predicted accuracy, and the final fused
product represents the best estimate of an object’s location in
three-dimensional space.
A variety of approaches can be used to support the calcula-
tions of predicted uncertainty. One possibility is to pre-com-
pute the predicted absolute uncertainty of every point in the
point cloud and directly store the associated (3 × 3) ground
error covariance matrices (
∑
ii
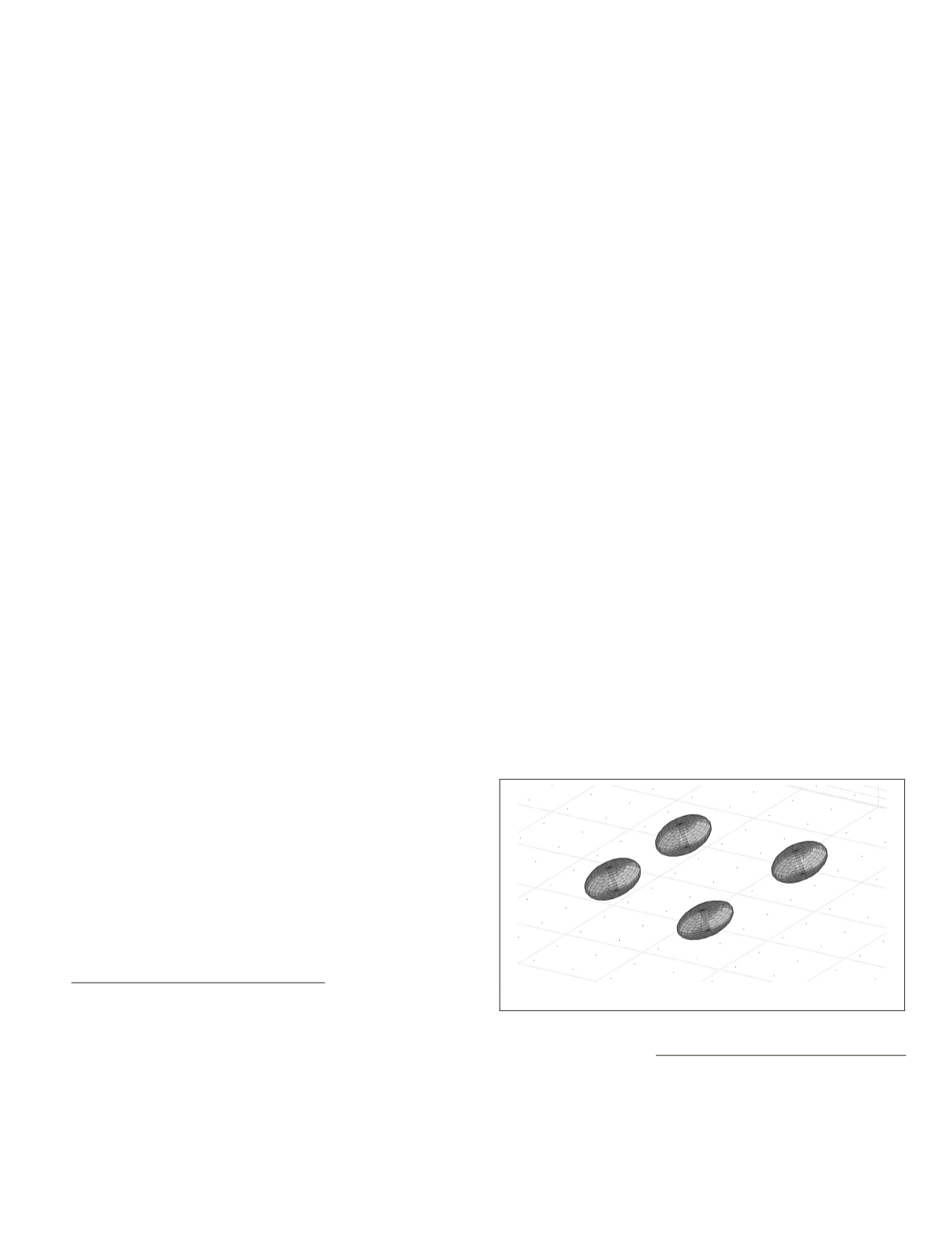
), as in Equation 1. For example,
consider the case illustrated in Figure 1, which shows error
ellipsoids associated with the absolute uncertainty of four
lidar points. The calculation of absolute uncertainty (and
construction of 3
D
error ellipsoids) for these four points (
n
=
4) requires the storage of 6
n
= 24 covariance matrix elements
(6 upper-triangular elements per point).
Figure 1. Absolute Error Ellipsoids for Four Points.
Christopher O’Neill is the Government Point of Contact -
Mail Stop S73-IBR, NGA Springfield, 7500 GEOINT Drive,
Springfield, VA 22150-7500
).
Craig Rodarmel, Mark Lee, John Gilbert, Ben Wilkinson,
Henry Theiss, and John Dolloff are NGA contactors - Mail
Stop S73-IBR, NGA Springfield, 7500 GEOINT Drive,
Springfield, VA 22150-7500.
Ben Wilkinson is currently with the Geomatics Program,
School of Forest Resources and Conservation, P.O. Box
110565, University of Florida, Gainesville, FL 32611.
Photogrammetric Engineering & Remote Sensing
Vol. 81, No. 7, July 2015, pp. 543–556.
0099-1112/15/543–556
© 2015 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.81.7.543
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2015
543


