After edge masking and focal filtering, BVs of the time 1
and time 2 images were differenced and normalized by the
time 1 value to determine where changes occurred. The dif-
ference between the time 1 and time 2 images were calculated
using Equation 1:
∆
BV
BV BV
BV
t
t
t
=
−
2
1
1
(1)
where
∆
BV
= temporal change in brightness value,
BV
t
1
=
brightness value at time 1,
BV
t
2
=
brightness value at time 2.
The preliminary change detection product is a continu-
ous raster of the normalized difference values, which is then
converted into a binary image depicting changed or non-
changed regions based on a threshold value. To be considered
a true change object, the magnitude of difference between the
pixel in time 1 and the corresponding pixel in time 2 must
exceed the defined threshold. Iterative testing was performed
by incrementally adjusting the bi-temporal difference thresh-
old to maximize detection of new cracks in the scene, while
simultaneously minimizing false detections. A unique feature
of the threshold employed is that only negative changes in
brightness are classified. This logic follows from the fact that
new cracks will only appear as decreases in brightness from
time 1 to time 2.
With the binary change detection product generated, the
next stage of the damage detection algorithm involved clas-
sifying changes as representing damage or not. The goal was
to identify and retain changes of interest while disregarding
false change caused by misregistration or differences in il-
lumination, as well as eliminating actual changes not of inter-
est. Examples of actual changes not of interest are the move-
ment of cars, shadows, and seasonal changes in vegetation.
Due to the limited radiometric resolution of the images (
RGB
in 8-bit jpeg format), it was difficult to separate meaningful
change from those not of interest based purely on spectral-ra-
diometric signatures. To make this distinction, several spatial
analytical methods were implemented to examine the spatial
and contextual properties of the detected change features.
Based on the generation of pseudo-objects through the clump
and sieve processes, key feature attributes such as size and
thickness were used as criterion to eliminate detected changes
not of interest.
As the goal of this study is reliable detection of fine-scale
crack damage features, detected changes that are more than
ten pixels wide (30 cm based on 3 cm
GSD
) can be eliminated
from consideration. To determine if a detected change object
is a crack, the use of a focal majority kernel filter was tested.
When passing the focal majority filter over a binary crack/
no crack image, it gradually dissolves detected features with
each iteration. Because target cracks are narrow features, they
are completely dissolved using this technique before larger
and more compact features such as cars. Based on the size of
the kernel filter and the number times it is applied, features
of different sizes can be effectively dissolved. Different kernel
sizes and numbers of applications were tested to determine
the ideal combination needed to eliminate narrow, fine-scale
features like cracks while retaining larger and more compact
features like cars, a primary change not of
interest. Therefore, a criterion for retention
of a feature as a crack is presence in the
binary change product before the use of the
majority filter and absence after, indicating
the eliminated feature is narrow because it
has been dissolved.
We tested another pixel-based method
for bi-temporal imagery using a bi-temporal
layer stack approach, such that the three-
band time 1 and time 2 images are com-
bined into a single six-band image. This
layer stack image was then classified using
the same supervised or unsupervised tech-
niques applied to the single-date images.
Variables tested included number of classes,
iterations and level of convergence needed
for classification. The like class outputs
of these classifications were converted
into pseudo-objects through the process of
clumping, and objects below the minimum
size criteria of 20 pixels were eliminated
with the sieve process.
eCognition
OBIA
software was also uti-
lized to develop rulesets for the detection
and delineation of cracks using bi-temporal
imagery. Products from the single-date clas-
sifications were used in post-classification
comparison mode to determine the effec-
tiveness of a geographic object-based image
change analysis (
GEOBICA
) technique in
detecting and delineating new cracks.
Accuracy Assessment
The accuracy assessment approach used to
determine the most successful combination
of parameters, thresholds, and/or rulesets
for detecting and identifying new damage in
the form of cracks in bridge and road surfac-
es was based on the successful detection of
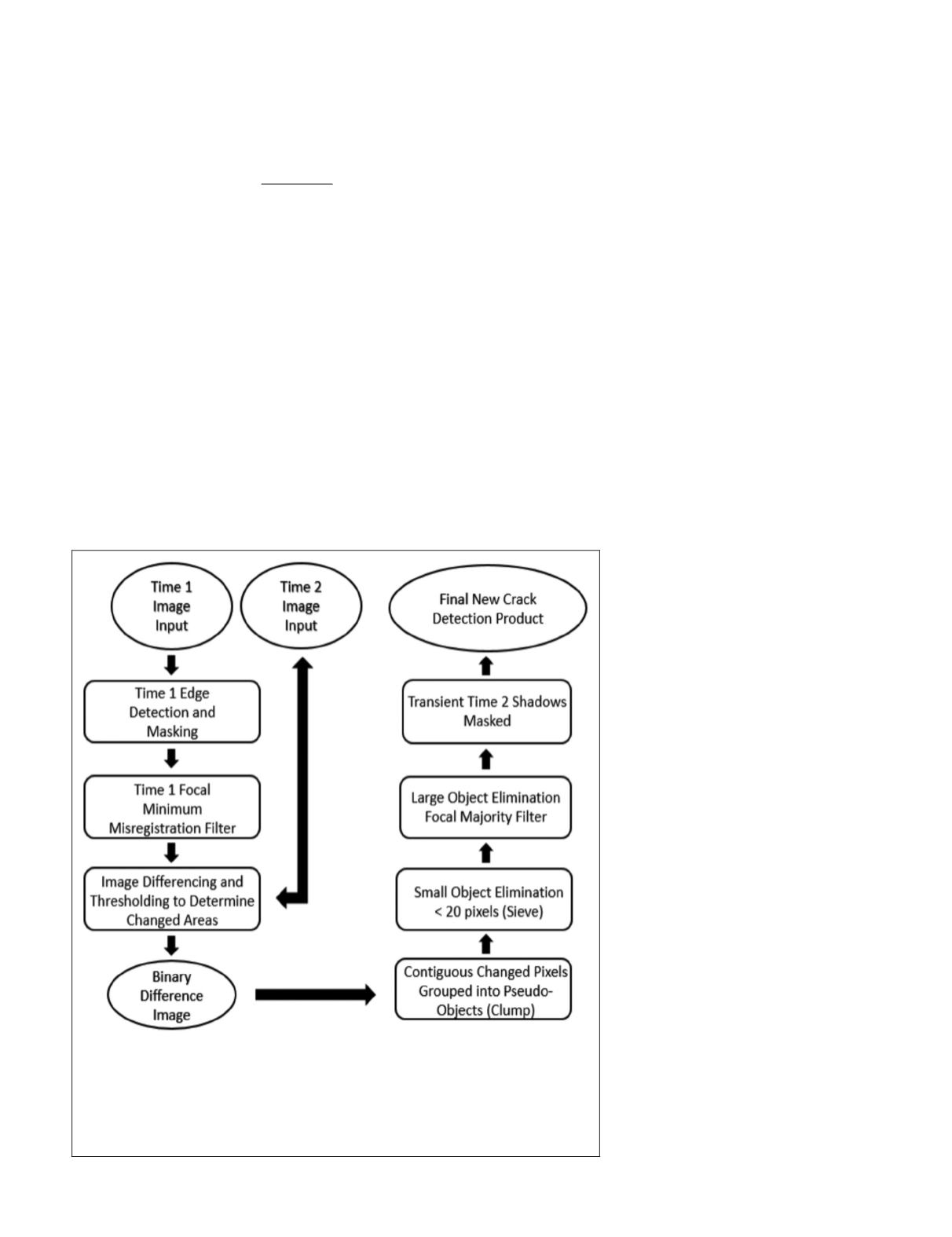
Figure 3. Workflow detailing the pixel-based image difference model with
spatial filtering model created with
ERDAS
Imagine software. After initial
processes to mask existing edges and compensate for residual misregistration are
performed on the time 1 image, a binary difference image of negative changes
meeting the threshold criteria is created. Further kernel based spatial filtering
techniques are applied to the difference image to eliminate detected changes not
of interest, attempting to leave only newly detected cracks in the final product.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
February 2018
79


