Range-Image: Incorporating Sensor Topology for
Lidar Point Cloud Processing
P. Biasutti, J-F. Aujol, M. Brédif, and A. Bugeau
Abstract
This paper proposes a novel methodology for lidar point
cloud processing that takes advantage of the implicit topol-
ogy of various lidar sensors to derive 2D images from the
point cloud while bringing spatial structure to each point.
The interest of such a methodology is then proved by ad-
dressing the problems of segmentation and disocclusion of
mobile objects in 3D lidar scenes acquired using street-based
Mobile Mapping Systems (
MMS
). Most of the existing lines of
research tackle those problems directly in the 3D space. This
work promotes an alternative approach by using this image
representation of the 3D point cloud, taking advantage of the
fact that the problem of disocclusion has been intensively
studied in the 2D image processing community over the past
decade. Using the image derived from the sensor data by
exploiting the sensor topology, a semi-automatic segmenta-
tion procedure based on depth histograms is presented. Then,
a variational image inpainting technique is introduced to
reconstruct the areas that are occluded by objects. Experi-
ments and validation on real data prove the effectiveness
of this methodology both in terms of accuracy and speed.
Introduction
Over the past decade, street-based Mobile Mapping Systems
(
MMS
) have encountered a large success as the onboard 3D
sensors are able to map full urban environments with very
high accuracy. These systems are now widely used for various
applications from urban surveying to city modeling (Serna
and Marcotegui, 2013; Hervieu
et al
., 2015; El- Halawany
et
al
., 2011; Hervieu and Soheilian, 2013; Goulette
et al
., 2006).
Several systems have been proposed in order to perform
these acquisitions. They mostly consist in optical image. The
pedestrian is correctly segmented and its background is then
reconstructed in a plausible way cameras, 3D LiDAR sensor
and GPS combined with Inertial Measurement Unit (
IMU
),
built on a vehicle for mobility purposes (Paparoditis
et al
.,
2012; Geiger
et al
., 2013). They provide multi-modal data that
can be merged in several ways, such as LiDAR point clouds
colored by optical images or LiDAR depth maps aligned with
optical images. Although these systems lead to very complete
3D mapping of urban scenes by capturing optical and 3D
details (pavements, walls, trees, etc.), providing billions of
3D points and
RGB
pixels per hour of acquisition, they often
require further processing to suit their ultimate usage.
For example,
MMS
tend to acquire mobile objects that are
not persistent to the scene. This result often happens in urban
environments with objects such as cars, pedestrians, traffic
cones, etc. As LiDAR sensors cannot penetrate opaque objects,
those mobile objects cast shadows behind them where no point
has been acquired (Figure 1, left). Therefore, merging optical
data with the point cloud can be ambiguous as the point cloud
might represent objects that are not present in the optical im-
age. Moreover, these shadows are also largely visible when the
point cloud is not viewed from the original acquisition point
of view. This might end up being distracting and confusing for
visualization. Thus, the segmentation of mobile objects and the
reconstruction of their background remain strategic issues in
order to improve the understanding of urban 3D scans.
We argue that working on simplified representations of
the point cloud enables specific problems such as disocclu-
sion to be solved not only using traditional 3D techniques but
also using techniques brought by other communities (image
processing in our case). Exploiting the sensor topology also
brings spatial structure into the point cloud that can be used
for other applications such as segmentation, remeshing, color-
ization, or registration.
P. Biasutti is with the Université de Bordeaux,
IMB
,
CNRS UMR
5251,
INP
, 33400 Talence, France; the Université de Bordeaux,
LaBRI
,
CNRS UMR
5800, 33400 Talence, France; and Université
Paris-Est,
LASTIG MATIS
,
IGN
,
ENSG
, F-94160 Saint-Mandé,
France (
).
J-F. Aujol is with the Université de Bordeaux,
IMB
,
CNRS UMR
5251, INP, 33400 Talence, France.
A. Bugeau is with the Université de Bordeaux,
LaBRI
,
CNRS
UMR
5800, 33400 Talence, France.
M. Brédif is with the Université Paris-Est,
LASTIG MATIS
,
IGN
,
ENSG
, F-94160 Saint-Mandé, France.
Photogrammetric Engineering & Remote Sensing
Vol. 84, No.6, June 2018, pp. 367–375.
0099-1112/18/367–375
© 2018 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.84.6.367
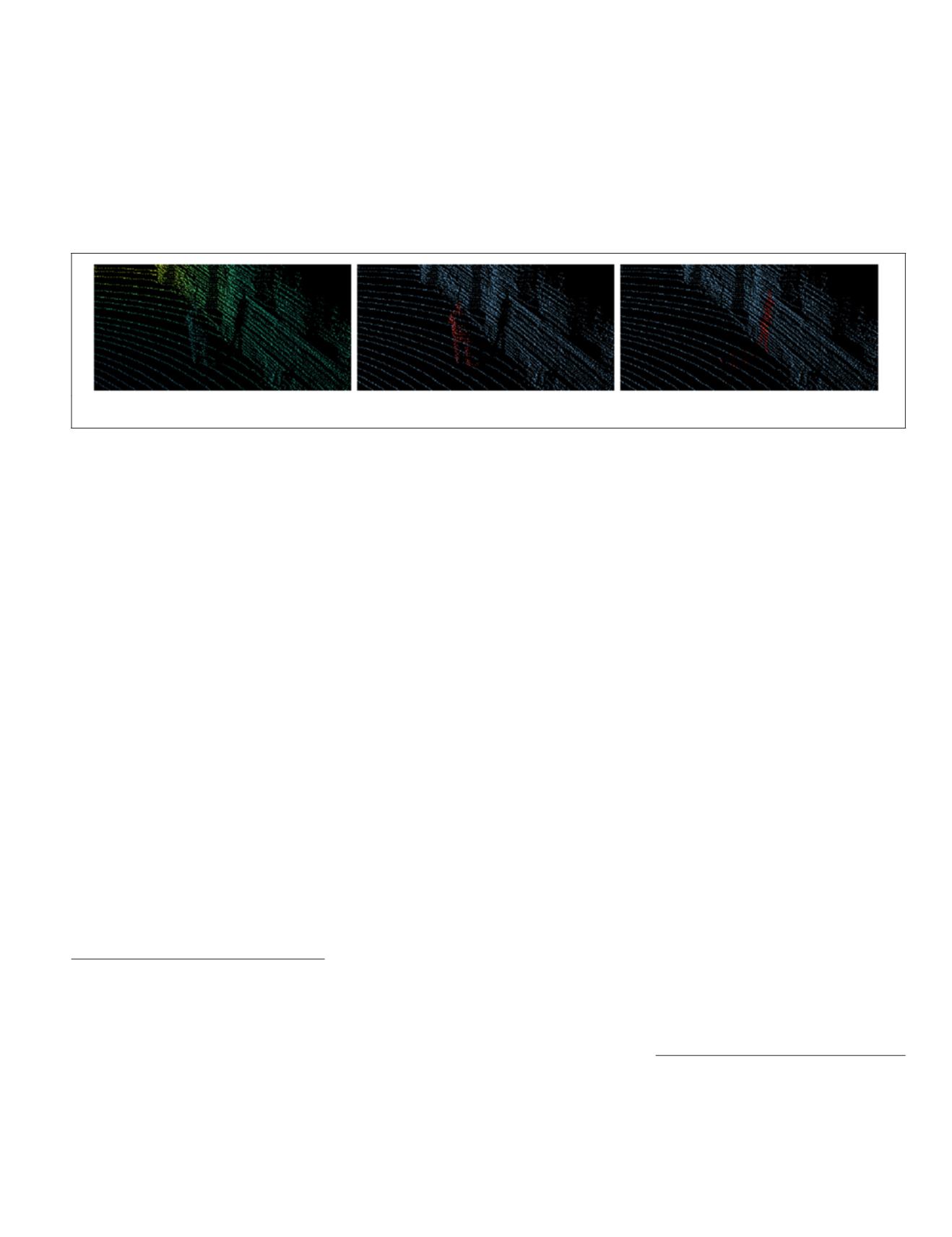
Figure 1. Result of the segmentation and the disocclusion of a pedestrian in a point cloud using range images. (left) original point
cloud, (center) segmentation using range image, (right) disocclusion using range.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
June 2018
367


