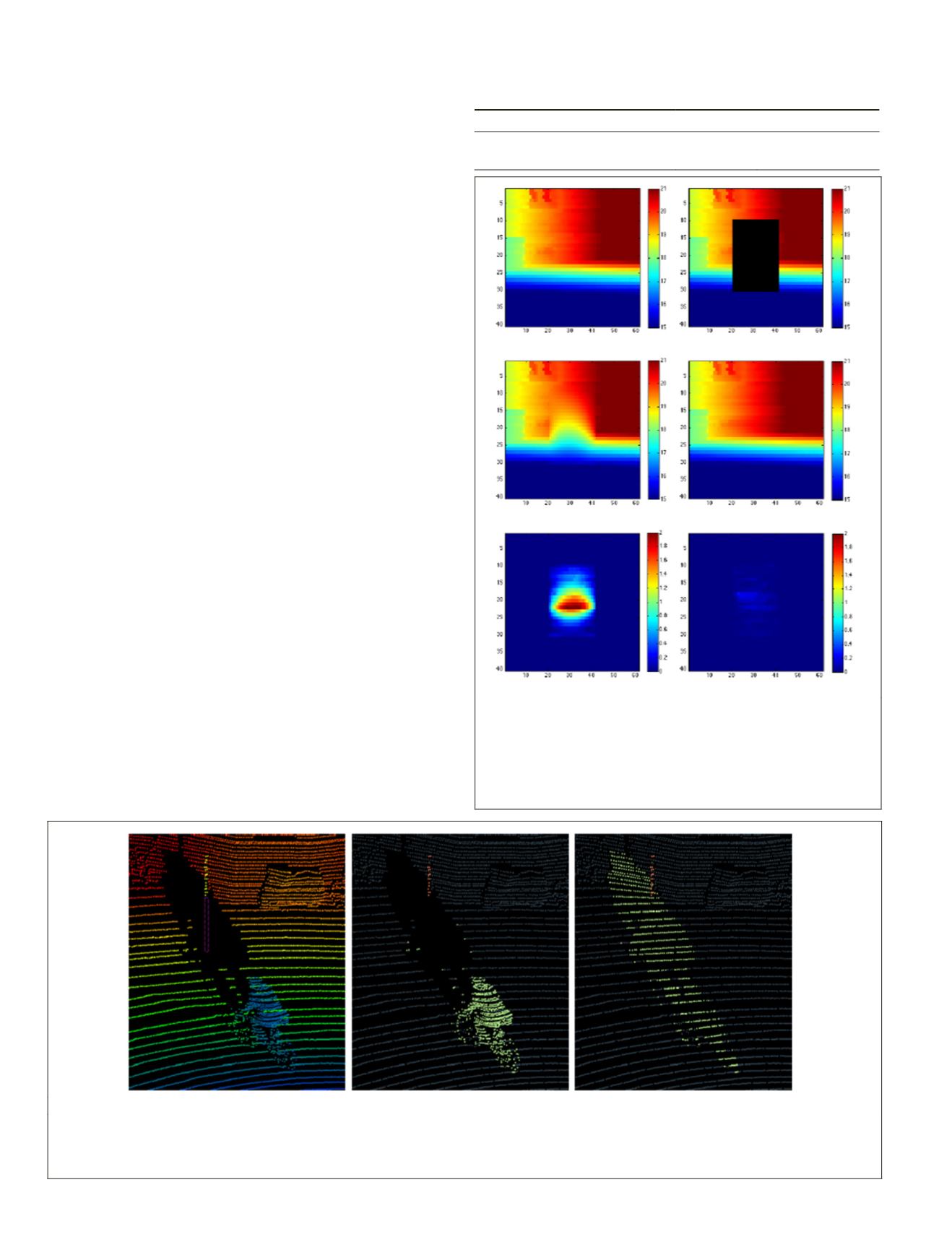
Figure 15 shows an example of disocclusion following this
protocol. The result of our proposed model is visually very
plausible whereas the Gaussian diffusion ends up oversmooth-
ing the reconstructed range image which increases the
MAE
.
Overlapping Objects
Although the proposed disocclusion method performs well
in realistic scenarios as demonstrated above, in some specific
contexts, the reconstruction quality can be debatable. Indeed,
when two small objects (pedestrians, poles, cars, etc.) over-
lap in front of the 3D sensor (e.g., one object is in front of the
other), the disocclusion of the closest object may not fully
recover the farthest object. Figure 16a shows an example of
such a scenario where the goal is to remove the cyclist (high-
lighted in green). In this case, a pole (Figure 16a, in orange) is
situated between the cyclist and the background. Figure 16b
presents the disocclusion of the cyclist. The background is
reconstructed in a plausible way, however, details of the oc-
cluded part of the pole are not recovered.
Conclusions
In this paper, we have proposed a novel methodology for
LiDAR point cloud processing that relies on the implicit
topology that is brought by most recent LiDAR sensors. Con-
sidering the range image derived from the sensor topology has
enabled a simplified formulation of the problem from having
to determine an unknown number of 3D points to estimating
only the 1D range in the ray directions of a fixed set of range
image pixels. Beyond drastically simplifying the search space,
it also provides directly a reasonable sampling pattern for the
reconstructed point set. Moreover, it also directly provides a
robust estimation of the neighborhood of each point accord-
ing to the acquisition, while improving the computational
time and the memory usage.
To highlight the relevance of this methodology, we have
proposed novel approaches for the segmentation and the
disocclusion of objects in 3D point clouds acquired using
MMS
.
These models take advantage of range images. We have also
proposed an improvement of a classical imaging technique
that takes the nature of the point cloud into account (horizon-
tality prior on the 3D embedding), leading to better results.
The segmentation step can be done online any time a new win-
dow is acquired, leading to great speed improvement, constant
memory requirements and the possibility of online processing
during the acquisition. Moreover, our model is designed to
work semi-automatically with using very few parameters in
(a) (b) (c)
Figure 16. Example of a scene where two objects overlap in the acquisition. (a) is the original point cloud colored with depth
towards sensor with the missing part of a pole highlighted with dashed pink contour, (b) shows the two objects that overlap.
a pole (highlighted in orange) and a cyclist (highlighted in green), (c) shows the disocclusion of the cyclist. Although the
background is reconstructed in a plausible way, details of the occluded part of the pole are missing.
Table 1. Comparison of the average
MAE
(Mean Absolute Error)
on the reconstruction of occluded areas.
Gaussian Proposed model
Average
MAE
(meters)
0.591
0.0279
Standard deviation of
MAEs
0.143
0.0232
(a)
(b)
(c)
(d)
(e)
(f)
Figure 15. Example of results obtained for the quantitative
experiment. (a) is the original point cloud (ground truth), (b)
the artificial occlusion in dark, (c) the disocclusion result with
the Gaussian diffusion, (d) the disocclusion using our method,
(e) the Absolute Difference of the ground truth against the
Gaussian diffusion, (f ) the Absolute Difference of the ground
truth against our method. Scales are given in meters.
374
June 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


