pixels, respectively, all less than 1 pixel. In the
CCD
direction,
the mean values of the forward, nadir, and backward views
are 1.266, 2.343, and 1.988 pixels, respectively, and the RMSE
values are 0.604, 1.468, and 0.999 pixels, respectively, which
are less than or close to 1 pixel. The viewing angle curves ob-
tained from Data A and Data B are very stable and have only
minor differences.
Comparing Data B with Data D, in the flight direction, the
mean values of the viewing angle curve differences are 2.852,
0.758, and 7.357 pixels for the forward, nadir and backward
views, respectively, and the RMSE values are 1.283, 0.542,
and 0.942 pixels, respectively, less than or close to 1 pixel. In
the
CCD
direction, the mean values of the forward, nadir, and
backward views are 3.998, 2.343, and 5.275 pixels, respective-
ly, and the RMSE values are 1.283, 1.466, and 3.862 pixels,
respectively. The differences between Data B and Data D are
significantly larger than the differences between Data A and
Data B, especially for the backward view
CCD
line array.
Four factors are responsible for t
1. For Data A and Data B, the acqui
are basically the same, and the a
between Data D and Data A and
flight area is different, and the imaging environment and
conditions also vary.
2. For Data D, the height altitude is 2600 m, which reduces
the ground resolution.
3. For Data D, 200
GCPs
are collected postflight by puncture
means and field measurements. Because
GCP
selection is
greatly limited in urban areas, some
GCPs
are located on
housing roofs, flower beds, pool corners, and other places
with abrupt height variation. The
GCPs
’ accuracy for Data D
is lower than that for Data A and Data B.
4. For Data D, the imaging quality of the backward view
CCD
is degraded for partial shutter occlusion, and this degrada-
tion also affects the point puncture accuracy.
Among the above four factors, factors 3 and 4 mainly
compensate for the large differences between Data B and Data
D shown in Table 6.
We calculate the final calibrated
CAM
files for the forward,
nadir and backward view
CCD
line arrays by averaging
CAM
files from Data A, Data B, and Data D. The accuracy and
reliability of calibrated
CAM
files will be further validated in
uncontrolled
DG
experiments. Using the average
CAM
files,
DG
was performed once again to assess the effect of the
CAM
files.
The
DG
results are shown in Table 7.
Table 7 shows that the calibrated
CAM
files can effectively
eliminate the positioning error caused by lens distortion,
CCD
rotation, scaling, and other geometric deformation and signifi-
cantly improve the height positioning accuracy. However, the
improvement in planar accuracy is not as obvious.
Redirect Geopositioning Based on GNSS Lever Arms and IMU Boresight
Misalignment Calibration Values and CAM Files
Using both the average
CAM
files and updated
GNSS
/
IMU
observations,
DG
was performed another time. The test results
are shown in Table 8. Table 8 shows that the positioning ac-
curacy in the
X
,
Y
, and
Z
directions is significantly improved
with the updated
GNSS
/
IMU
observations and
CAM
files and is
close to the accuracy level after
AT
and calibration. This find-
ing proves that the average calibration values of
GNSS
lever
arms and
IMU
boresight misalignment and
CAM
files are stable
and have good applicability.
For a more visual analysis, the experimental results for
Data B and Data C are plotted. The experimental results for
d 8 are plotted in Figures 13–16.
al error distribution of 108 control
ot shows the residual distribution in
ns), and the right figure shows the
residual distribution in the height direction. Figure 14 shows
the residual error distribution after
AT
& Calibration. Figure 15
shows the residual distribution of the direct positioning using
CAM
files. Figure 16 shows the residual distribution of the
direct positioning using both updated
GNSS
/
IMU
observations
and
CAM
files. The coordinates shown from Figure 13 through
ureFigure 16 adopt the local coordinate system.
As shown in Figure 13, for
DG
with
GNSS
/
IMU
observations
and initial
CAM
files, there are obvious systematic errors. The
plane residuals of different strips have obvious directional-
ity, but the variation in height residuals remains consistent.
In Figure 14, the remaining errors are mainly causality errors
since the systematic positioning errors caused by the
GNSS
lever arms,
IMU
boresight misalignment, lens distortion, and
CCD
deformation are effectively eliminated after
AT
& Calibra-
tion. Using
GNSS
/
IMU
observations and calibrated
CAM
files for
the second direct
DG
, Figure 15 shows that this approach can
significantly improve height accuracy but has a minor effect
on planar accuracy. With updated
GNSS
/
IMU
values and cali-
brated
CAM
files, Figure 16 shows that both height accuracy
and planar accuracy are effectively improved. From Figures
13–16, we can obtain the following preliminary conclusions:
The
GNSS
lever arms and
IMU
boresight misalignment mainly
affect the plane positioning accuracy of the
GFXJ
camera; The
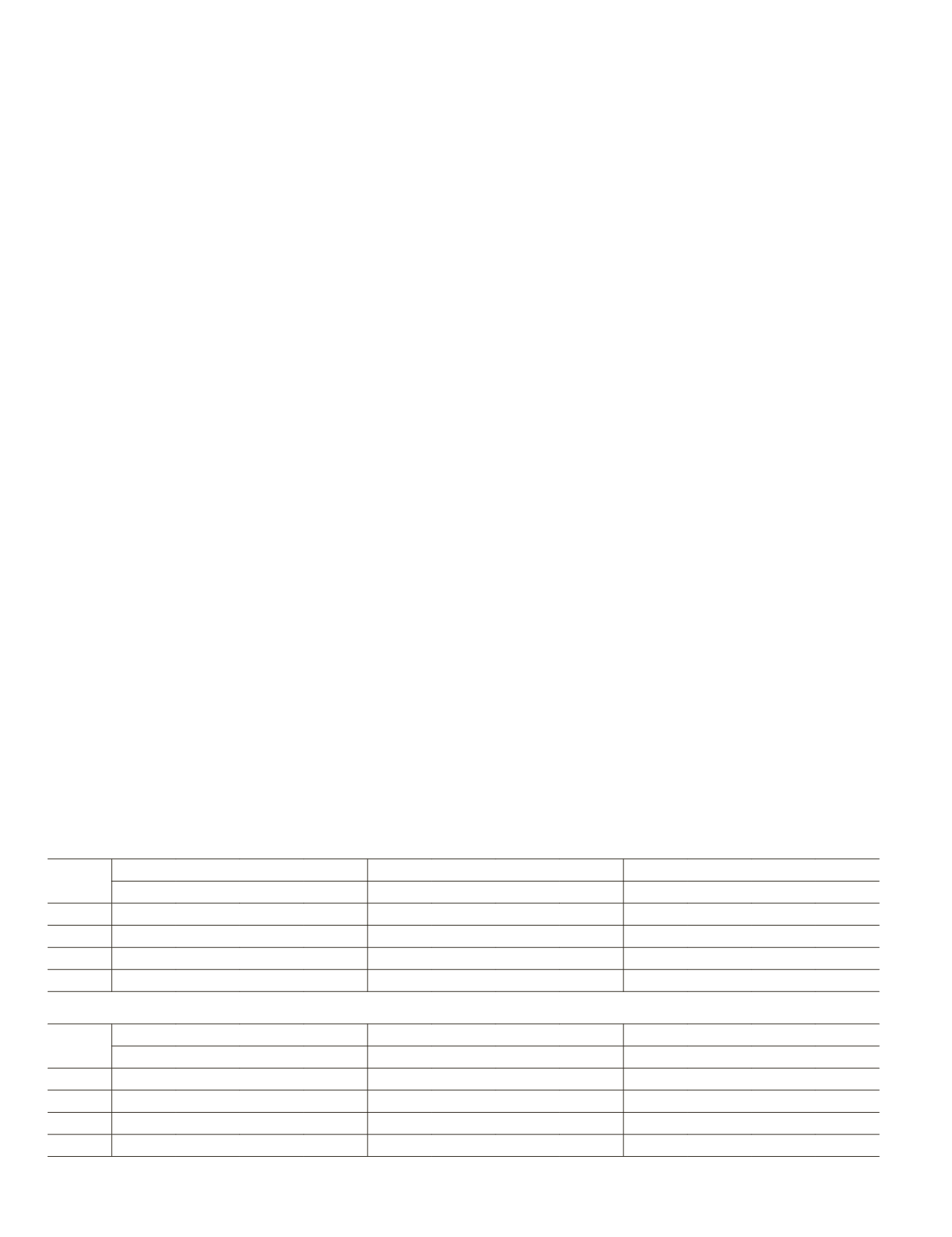
Table 7. Direct geopositioning based on
CAM
files.
Test
Data
Accuracy in
X
direction (meters)
Accuracy in
Y
direction (meters)
Accuracy in
Z
direction (meters)
Max
Min Mean Std
Max
Min Mean Std
Max
Min Mean Std
Data A 4.763 −4.003 0.049 2.311 4.475 −3.833 1.264 3.211 1.188 −1.121 0.031 0.692
Data B 4.812 −4.142 0.722 3.543 4.363 −4.686 0.354 3.571 1.768 −0.798 0.560 0.823
Data C 4.681 −3.797 0.458 3.961 1.820 −2.196 −0.140 1.750 1.588 −1.599 0.454 0.779
Data D 6.501 −6.156 1.600 4.104 6.969 −6.231 1.138 3.152 3.259 −3.099 −0.200 0.908
Table 8. Direct geopositioning based on updated
GNSS/IMU
observations and
CAM
files.
Test
Data
Accuracy in
X
direction (meters)
Accuracy in
Y
direction (meters)
Accuracy in
Z
direction (meters)
Max
Min Mean Std
Max
Min Mean Std
Max
Min Mean Std
Data A 0.561 −0.565 −0.002 0.235 0.641 −0.651 0.002 0.267 0.823 −0.878 −0.010 0.278
Data B 0.687 −0.290 −0.013 0.119 0.403 −0.210 0.024 0.110 0.492 −0.556 0.009 0.256
Data C 0.511 −0.182 −0.007 0.123 0.234 −0.472 0.006 0.158 0.703 −0.865 0.015 0.267
Data D 0.769 −1.024 −0.315 0.397 0.797 −0.835 0.011 0.313 1.082 −0.991 0.247 0.309
654
September 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


