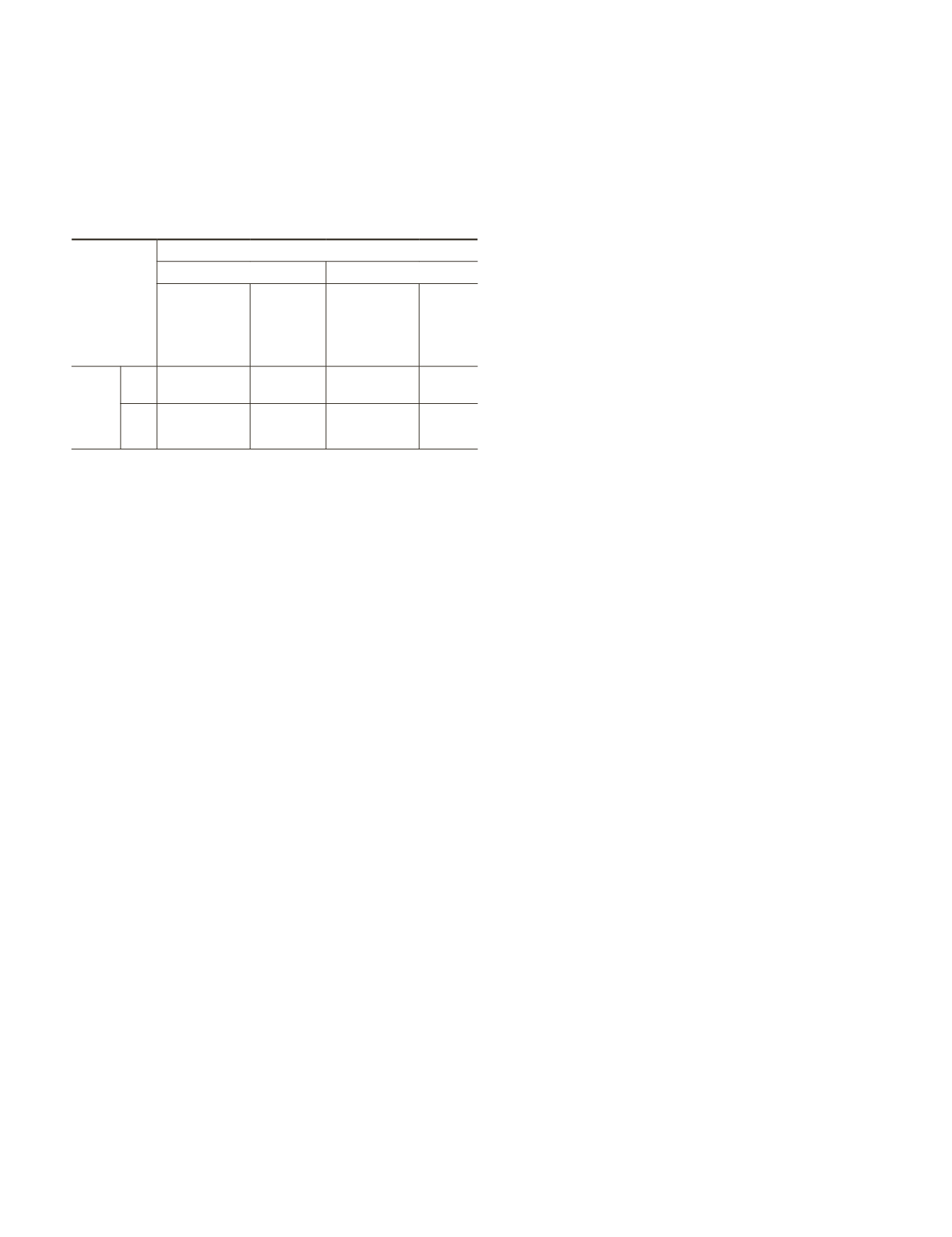
The residual errors in image space were also examined
for the extreme cases in the experiments at 40 m range. The
control points were back-projected to the image space, and
the back-projected positions were compared with the true
positions manually identified in the images acquired by the
surveillance camera and the
PTZ
camera to obtain the image
residuals. The results are summarized in Table 2.
T
able
2. I
mage
R
esiduals
for
the
E
xtreme
C
ases
in
the
E
xperiments
at
40
m
R
ange
Baseline length
0.5 m
1 m
Residual
on the
surveillance
camera image
Residual
on the
PTZ
camera
image
Residual
on the
surveillance
camera image
Residual
on the
PTZ
camera
image
Focal
length
of the
PTZ
camera
10
mm
2.76 pixels 1.29 pixels 2.63 pixels
1.17
pixels
100
mm
2.72 pixels
11.52
pixels
2.42 pixels
11.09
pixels
From Table 2, it can be seen that when the baseline length
increases from 0.5 m to 1 m, the image residuals decrease for
both the 10 mm and 100 mm focal lengths of the
PTZ
camera.
When the focal length of the
PTZ
camera increases from 10
mm to 100 mm, the image residuals on the surveillance cam-
era image decrease for both the 0.5 m and 1 m baselines. It is
not strange to see that the image residuals on the
PTZ
camera
image increase to over 10 pixels in this case, since its focal
length increases by 10 times. The image residuals at different
PTZ
camera pan angles are negligible.
Conclusions and Discussion
We have presented a systematic analysis of the measure-
ment accuracy of a dual camera system with an asymmetric
photogrammetric configuration. We have drawn the following
conclusions from theoretical derivation, Monte-Carlo simula-
tion, and actual experimental analysis.
1. The baseline length was the main factor influencing the
measurement accuracy of the dual camera system. This
influence was more significant over long ranges than
over short ranges.
2. The focal length of the
PTZ
camera influenced the
measurement accuracy. The influence was related to
the surveillance camera’s focal length. When the
PTZ
camera’s focal length was far longer than the surveil-
lance camera’s focal length further increasing of the
former would not improve the accuracy notably.
3. The pan angle of the
PTZ
camera had an influence on the
range measurement accuracy. This influence was more
significant at long range than at short range. The best
accuracy was when the
PTZ
camera pointed to targets
within a specific range to the middle of the baseline.
4. The optimum configuration for greater than 1 percent
measurement accuracy within a normal observation
range (e.g., 60 m) was found using theoretical deriva-
tion, Monte-Carlo simulation, and actual experimental
analysis. The optimum focal length for the surveillance
camera was found to be 8 mm, combined with a
PTZ
camera focal length of greater than 60 mm and a
PTZ
camera pan angle within ±20°, and a baseline length
between the two cameras of over 0.75 m.
To date, a dual camera system with an asymmetric pho-
togrammetric configuration had not been systematically
investigated, due to unusual difficulties such as the geometric
modeling and calibration of cameras with different character-
istics, correspondence between images with large differences
(e.g., in scale,
FOV
, and coverage), camera orientation, camera
coordination and accuracy evaluation of the system. This
paper has focused on the accuracy analysis of the asymmetric
photogrammetric configuration, and these discoveries will
facilitate research and development in other areas of asym-
metric photogrammetry.
The proposed dual camera system is more flexible in the
context of real surveillance than traditional camera networks,
which could lead to a dramatic increase in the deployment
of stereo video surveillance systems. By providing rapid 3
D
information and high-resolution imaging data, the camera
system has enhanced capabilities for tracking moving objects.
In combination with automated image analysis and camera
coordination, this system is suitable for intelligent applica-
tions such as robotic exploration, traffic monitoring and
hazard detection.
Acknowledgments
The work described in this paper was supported by research
grants from the Hong Kong Polytechnic University (Grant
A/C: G-YN12 and A-PL58). The work was also supported by a
grant from the Research Grants Council of Hong Kong (Project
No: PolyU 5330/12E) and a grant from the National Natural
Science Foundation of China (Project No: 91338110).
References
Allen, P., and R. Bajcsy, 1986. Two sensors are better than one: Ex-
ample of vision and touch,
Proceedings of the 3
rd
International
Symposium on Robotics Research
, Gouvieux, France, pp. 48–55.
Di, K., and M. Peng, 2011. Wide baseline mapping for Mars Rovers,
Photogrammetric Engineering & Remote Sensing
, 77(6):609–618.
Di, K., and R. Li, 2007. Topographic mapping capability analysis of
Mars Exploration Rover 2003 mission imagery,
Proceedings of
the 5
th
International Symposium on Mobile Mapping Technology
(MMT 2007), 28-31 May, Padua, Italy, unpaginated CD-ROM.
Fraser, C.S., 1982. Optimization of precision in close-range photo-
grammetry,
Photogrammetric Engineering & Remote Sensing
,
48(4):561–570.
Gao, Z.B., S. Pandya, N.Hosein, M.S. Sacks, and N.H. Hwang, 2000.
Bioprosthetic heart valve leaflet motion monitored by dual
camera stereo photogrammetry,
Journal of Biomechanics
,
33(2):199–207.
Hartley, R., and A. Zisserman, 2004.
Multiple View Geometry in Com-
puter Vision
, Second edition, Cambridge University Press, 670 p.
Iwata, K., Y. Satoh, I. Yoda, and K. Sakaue, 2006. Hybrid camera
surveillance system by using stereo omni-directional system and
robust human detection,
Proceedings of the Pacific-Rim Sym-
posium on Image and Video Technology 2006
, 11-13 December,
Hsinchu, Taiwan, LNCS 4319, pp. 611–620.
Kanade, T., R. Collins, A. Lipton, P. Burt, and L. Wixson, 1998. Ad-
vances in cooperative multi-sensor video surveillance,
Proceed-
ings of the DARPA Image Understanding Workshop
, November,
pp. 3–24.
Li, R., K. Di, L.H. Matthies, R.E. Arvidson, W.M. Folkner, and B.A.
Archinal, 2004. Rover localization and landing-sitemapping
technology for 2003 Mars Exploration Rover mission,
Photo-
grammetric Engineering & Remote Sensing
, 70(1):77–90.
Luhmann, T., 2009. Precision potential of photogrammetric 6DOF
pose estimation with a single camera,
ISPRS Journal of Photo-
grammetry and Remote Sensing
, 64(3):275–284.
Luh, J.Y., and J.A. Klaasen, 1985.A three-dimensional vision by off-
shelf system with multi-camera,
IEEE Transaction on Pattern
Analysis and Machine Intelligence
, PAMI-7, pp. 35–45.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
March 2015
227


