MP
= (
NCM
/
NTM
)×100%
(8)
where
NTM
is the number of total matches. One of a key issue
in this formula is to determine correct matches for evaluation.
We hence use both an automatic way to approximately count
this and a manual way to precisely determine this:
1.
Automatic Evaluation
: for frame camera images, a projec-
tive transformation is fitted for each pair of images by
using manually selected and uniformly distributed control
points; then, those matches with localization errors small-
er than 2 pixels based on the consistency of the projective
transformation are regarded as correct matches; for linear
CCD
pushbroom images, the projective transformation is
replaced by quadratic polynomials.
2.
Manual Evaluation Through Sampling
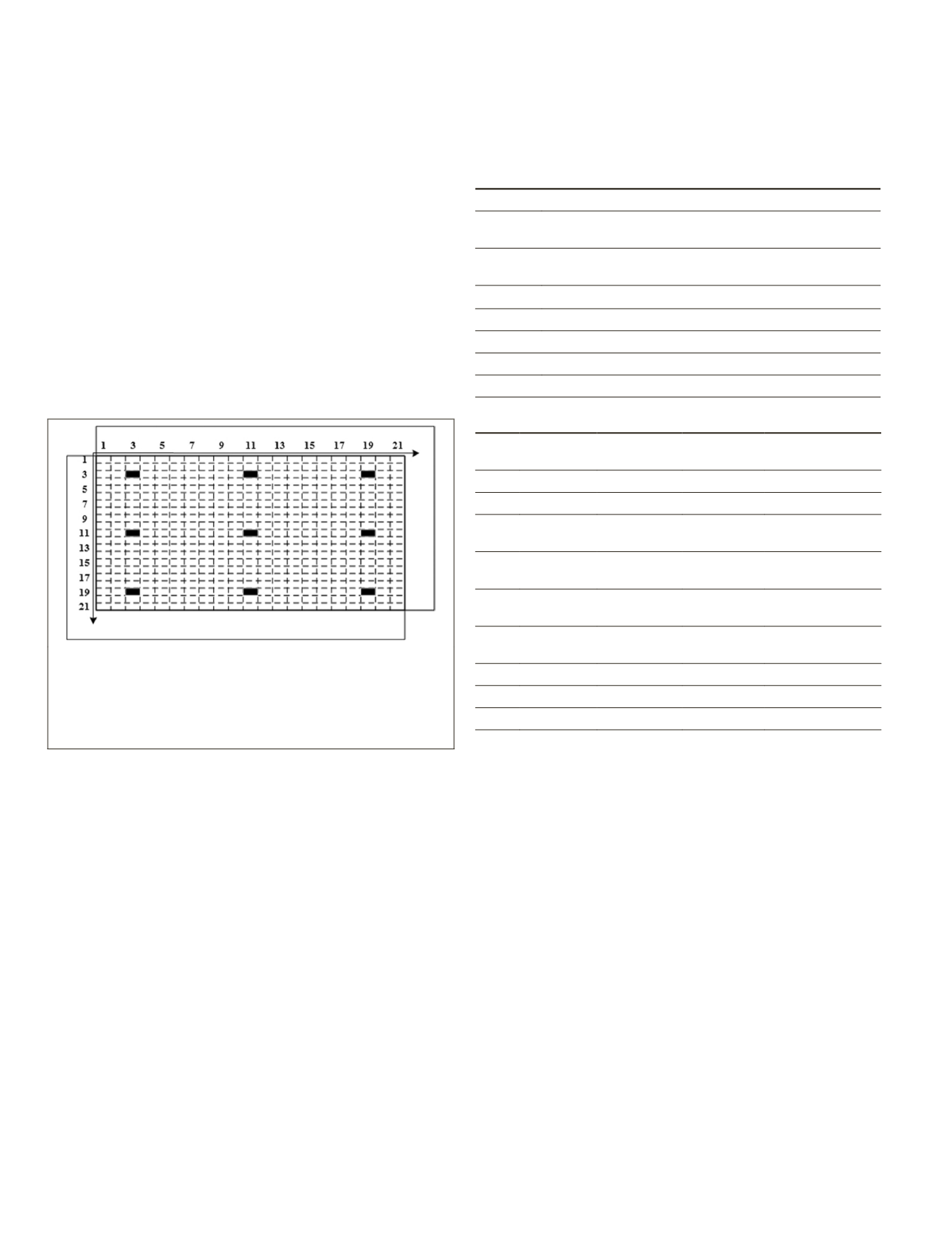
: for each pair of im-
ages, the overlap region is divided into 21×21 sub-regions
as shown in Figure 4. Among the sub-regions, nine even-
distributed sub-regions are selected as samples and all
matches in these samples are checked manually and thus
yield the
MP
quantity.
Figure 4. Point sampling pattern of manual evaluation
method. The overlap region of these two images is divided
into 21×21 sub-regions (dotted box). Among of them, 9 even-
distributed sub-regions (filled sub-regions) are selected as
samples. We compute the
MP
values of each method in these
samples to represent the performance in the whole images.
Thresholds Setting
Table 2 lists all the relevant parameters in the experiments.
The thresholds
k
and
T
p
to compute and find pixels with
high pixel distinctiveness factor values are set as
k
= 0.06 and
T
p
= 0.01×
PF
max
according to the thresholds setting of tradi-
tional pixel distinctiveness based detectors (Schmid
et al
.,
2000).
PF
max
is the maximum of the observed pixel distinc-
tiveness value. The number of sub-regions in overlap region
division
M
×
N
will not affect the final result significantly. It
is empirically set as 5×5.
s
% and
t
% control the saliency of
the detected
LDF
s and seed points, respectively. The setting of
these two thresholds relies on the application. If the applica-
tion requires correspondences with high matching precision
and only a small number of correspondences can meet the
demand, a smaller
s
% is better. Otherwise, if the application
requires a large number of correspondences, the value of
s
%
should be set larger. In our experiments,
s
% is set as 50 per-
cent empirically. Seed matches are used to compute a coarse
transformation between images. A minimum of six matches
are needed to compute the transformation. The reliability of
the matches is more important than the number. Therefore,
a small value of
t
% is acceptable, which is set as 5 percent
empirically in our experiments. Other two parameters
r
and
T
w
play important role in the proposed method. They are
tuned in our study using the trial-and-error approach (Ye
et
al
., 2017). The tuning is based on nine pairs of remote sensing
images with repetitive patterns, including satellite images,
aerial images and
UAV
images as shown in Table 3, which are
not part of our experiment regions.
Table 2. Thresholds of the proposed method.
Thresholds
Description
k
an empirically determined constant for the feature
response computation in the step of
LDFs
detection
T
p
the pixel distinctiveness factor value threshold in the step
of
LDFs
detection
M
×
N
the number of sub-regions in overlap region division
s
% the percentage of the most distinctive points to be
LDFs
t%
the percentage of the most distinctive
LDFs
to be seed points
r
radius of feature support region to compute
SIFT
descriptor
T
w
the
FIPS
detection threshold in the matching step
Table 3. Description of datasets adopted in thresholds tuning.
Image
Pair
Image
Source
GSD
(unit: meter)
Image Size
(unit: pixel)
Test Site
1
ZY-3
3.50
1000×1000 Wuhan, China
2
IKONOS
1.00
1000×1000 Beijing, China
3 QuickBird
0.61
1000×1000
San Francisco,
USA
4 WorldView-2 0.50
1000×1000
San Francisco,
USA
5 WorldView-3 0.30
1000×1000
Buenos Aires,
Argentina
6
Aerial
0.38
1000×1000
Zurich,
Switzerland
7
Aerial
0.10
1000×1000 Taizhou, China
8
UAV
0.01
1000×1000 Guizhou, China
9
UAV
0.01
1000×1000 Nanchang, China
1.
Feature Support Region Radius r
In this part, in order to find a good threshold
r
, all other
thresholds are set as constant:
k
= 0.06,
T
p
= 0.01×
PF
max
,
M
×
N
= 5×5,
s
% = 50%,
t
% = 5%, and
T
w
= 0.004. All the
nine pairs of images described in Table 3 are matched
under different feature support region radius (note image
scale compensated through GSD). The tested feature
support region radius values are shown in Equation 9:
r
= [8, 16, 24, 32, 40, 48, 56, 64, 72, 80, 88, 96]
(9)
The statistic
NCM
and
MP
values are shown in Figure 5.
The experimental results in Figure 5 show that a feature
support region with a small size or large size produces low
NCM
and
MP
values. On one hand, a small feature support
region might be unreliable for descriptors. On the other
hand, a large feature support region may cause the de-
scriptors of correspondence to not distinguishable enough
to be recognized. It is also shown that the overall peak
performance of
NCM
and
MP
have been obtained when the
region radius is set as 48 pixels.
2.
FIPS
Detection Threshold T
w
In order to tune the threshold
T
w
, we compute the feature
repeatability rate (
FRR
) values of the nine pairs of images
in Table 3 under different
T
w
values.
518
August 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


