candidates in images of highly repetitive texture patterns. Al-
though existing strategies like the Nearest Neighbor Distance
Ratio (
NNDR
) (Lowe, 2004) or
RANSAC
can avoid or eliminate
some of the false matches, they cannot increase correct match-
es and may lead to unevenly distributed matching results.
In order to overcome the problem, both the local geometric
distinctiveness of pixel and the global distinctiveness of the
surrounding support region are considered in the proposed
LDF
detector. The feature response function in the
LDF
detector
is defined as Equation 1:
FR
=
f
α
(
p
i
)·
g
β
(
r
i
)
(1)
where
f
(
p
i
) measures the local geometric distinctiveness of
pixel
p
i
;
g
(
r
i
) measures the distinctiveness of the support re-
gion
r
i
around the pixel
p
i
;
α
and
β
are two weight coefficients
controlling the relative significance of the local geometric
distinctiveness of pixel and the distinctiveness of the support
region in the detection process, where they are equally impor-
tant in our method, being
α
= 0.5 and
β
= 0.5.
The local geometric distinctiveness
f
(
p
i
) of pixel is com-
pute as the Harris corner response within a local window
(Equation 2) (Harris and Stephens, 1988):
f
(
p
i
) = det(
M
p
i
) –
k
·tr
2
(
M
p
i
),
(2)
where
M
p
i
is essentially the 2×2 aggregated covariance matrix
computed from image derivatives as Equation 3; det( ) refers
to the determinant of a matrix; tr( ) refers to the trace of a
matrix;
k
is an empirically determined constant.
M
I
I I
I I
I
p
x x y
x y
y
x y
i
w x y
=
(
)
∑
, ,
,
σ
2
2
,
(3)
where
I
x
and
I
y
are the first order partial derivatives at pixel
p
i
;
w
(
x, y,
σ
) is a Gaussian weight function with scale
σ
.
The distinctiveness of the surrounding support region of
a pixel can be expressed using the difference between the
current support region and other support regions. Given the
invariant nature of the
SIFT
descriptors, we use the distance of
SIFT
descriptors computed from different supporting regions
as the measure of support region differences. The function
measuring the difference of support region is defined as Equa-
tion 4. For a support region, if its minimal difference to the
other support regions is large, this support region is regarded
as distinctive.
g
(
r
i
) = min
|
D
p
i
–
D
p
j
, j
≠
i
|
,
(4)
where
D
p
i
is the normalized
SIFT
feature descriptor computed
from the support region of current pixel.
D
p
j
,
j
≠
i
is the
SIFT
fea-
ture descriptor computed from the support region of all other
pixels. By substituting Equations 2 and 4 back to Equation 1,
the feature response function of the
LDF
detector is defined as
Equation 5:
FR
k
D D
p
p
p
p p j i
i
i
i
i
j
=
(
)
− ⋅
(
)
⋅
−
(
)
≠
det
tr
min
,
M
M
2
α
β
. (5)
The first half of Equation 5 (pixel distinctiveness factor)
reflects the local geometric distinctiveness of a pixel. A larger
value means higher corner point response. The second half
of Equation 5 (region distinctiveness factor) evaluates the dis-
tinctiveness of the support region around this pixel. Because
in feature matching process, feature descriptor is calculated
from the support region around the feature point, the distinc-
tiveness of the support region determines the distinctiveness
of the feature descriptor. Therefore, the region distinctive-
ness factor in Equation 5 reflects the potential of the feature
descriptor computed from this support region being identified
correctly in the matching procedure, thus greatly influencing
the possibility that the feature point is correctly matched.
The feature descriptor to compute region distinctiveness
can be flexibly selected. However, we recommend that the
descriptor adopted in feature response function computation
(Equation 5) should be the same as that in the subsequent
matching procedure because the region distinctiveness fac-
tor in the feature response function is designed to reflect the
matching potential of a feature. In our application, all the
images to be processed are optical images. The
SIFT
descrip-
tor is able to deal with the grayscale difference between these
images. Besides, there is no severe rotation between images
because these images have been approximately geo-refer-
enced. The orientation of each pixel can be set as the same
degree in the descriptor computation. In addition, the scale
change between images can be estimated according to image
spatial resolution. Therefore, we term in this case the
SIFT
as a
uniform
SIFT
(
USIFT
) descriptor, which computes
SIFT
descrip-
tors from support region with fixed size and orientation. The
USIFT
descriptor is adopted in the
LDF
detector.
The computation of region distinctiveness (second half
of Equation 5) is very time consuming if we compute the
descriptor difference exhaustively over all the pixels in the
whole image, therefore to speed-up the computation, two
preprocesses are adopted in the computation:
First, we reduce the descriptor comparison region from the
whole image to a local region. Because the correspondence
search in the subsequent feature matching will be constrained
in a local search area based on an image geometric transfor-
mation, it is not necessary to detect global distinctive features
in feature detection procedure;
Second, we pre-filter pixels with very small pixel distinctive-
ness, as they have smaller likelihood to be correctly detected.
Figure 2 is an example showing the difference between the
region distinctiveness factor and the pixel distinctiveness factor.
It is observed from Figure 2b that many pixels in the sub-
region (marked in the white box) have strong pixel distinc-
tiveness factor values, while we can see from Figure 2a that
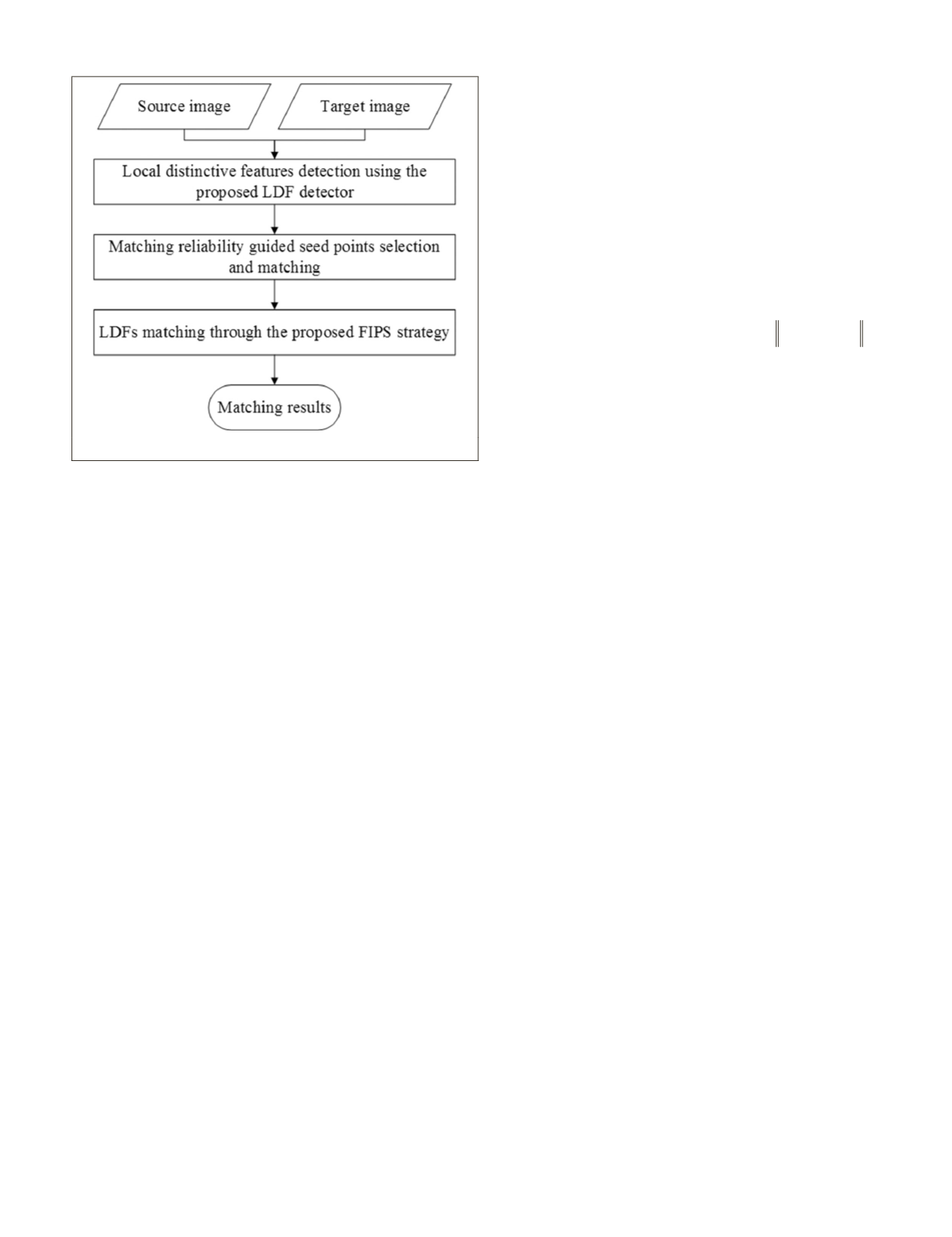
Figure 1. Workflow of the proposed matching method.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
August 2018
515


