roads omitted by
NLCD
in the western
United States. The fusion of
NLCD
and
BTS
data also ensured that subse-
quent process steps were applied
uniformly across the country, and that
implementation of our methods did
not result in the loss of small urban
developments throughout the West.
The aggregated
NLCD
2001 and
BTS
composite was then used as the start-
ing point for identifying urban areas
by removing pixels that corresponded
to rural roads. We evaluated a variety
of filtering functions to remove road
pixels. We initially tested small neigh-
borhood filters to erode the road pixels
in the
NLCD
/
BTS
composite (Figure 3).
Neighborhood filters are morphologi-
cal operators available in the ERDAS
Imagine
®
(Intergraph, 2014) software
package that use a square structuring
element (also known as a kernel or
array) that passes over each cell in the
classified map and performs an opera-
tion based on the characteristics of the
neighboring pixels. For example, a 3
× 3 majority filter recodes the center
pixel in the kernel to the value cor-
responding to the class that represents
the majority of pixels in the larger
9-cell array. While small kernels (3 ×
3) effectively removed scattered pixels
and narrow road elements, they were
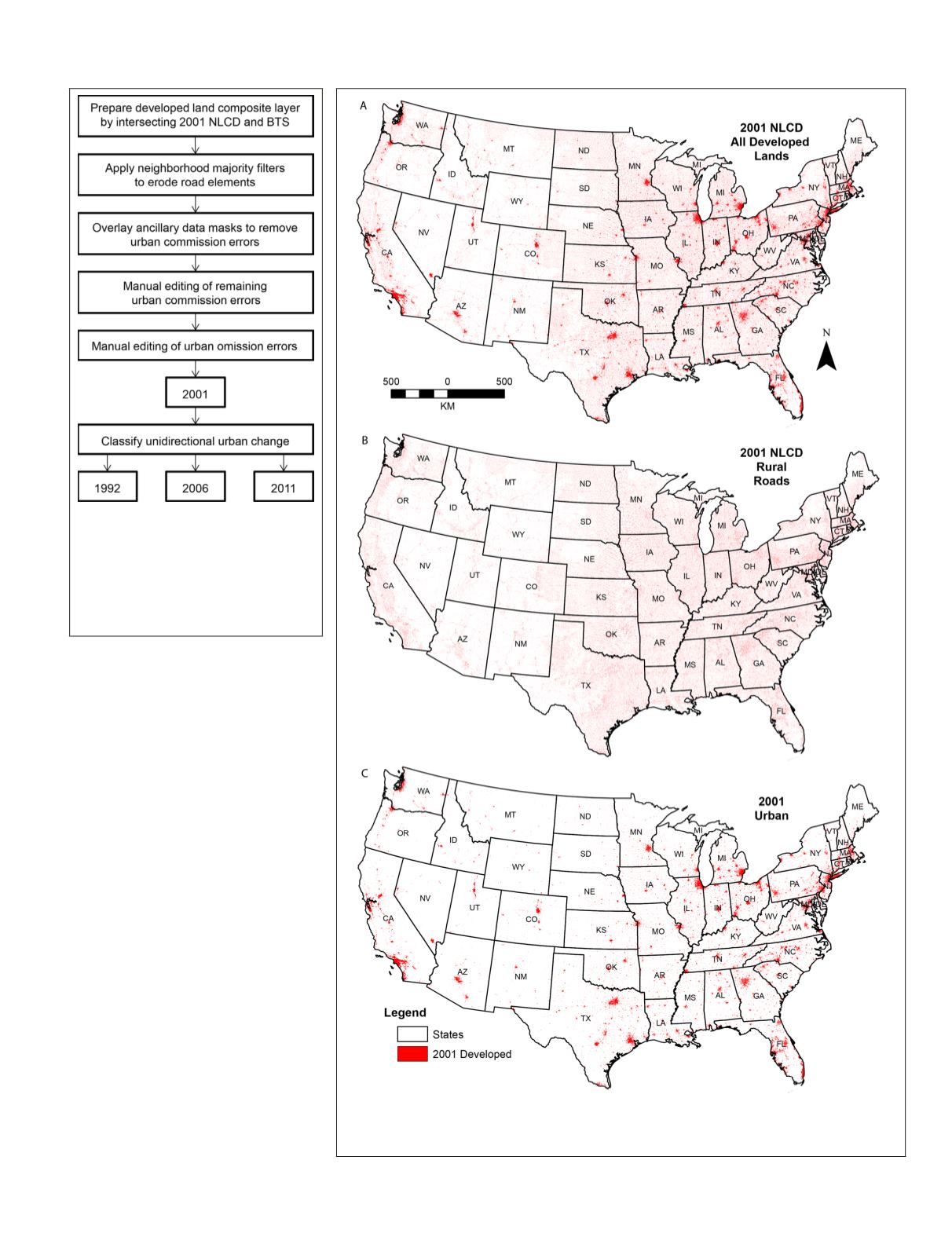
Figure 1. Conceptual diagram
describing the process of removing
roads from
NLCD
to create urban
maps. The process includes
neighborhood filtering, as well
as automated and manual editing
processes to resolve commission
and omission errors.
Figure 2. Illustration representing (A) lands mapped as developed by 2001
NLCD
,
(B) rural roads removed from
NLCD
developed lands, and (C) 2001 urban map where
speckle associated with roads has been removed.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
February 2018
103


