Similarly, the trajectories and the
RMSE
are shown in Figure 6
and Table 5, respectively. It can be seen that the accuracy in
the horizontal plane is much improved while there is no im-
provement in height. The
RMSE
with map matching is only 23
percent of the integration. Since the digital map can provide
the azimuth, the azimuth estimation
RMSE
is reduced to 4.116
degrees from 7.149 degrees. With the improvement of azimuth
estimation, the velocity estimation is also slightly improved.
Start Point
End Point
Figure 6. Trajectories of the second dataset.
Table 5. Position
RMSE
of different methods for the second
dataset (unit: meter).
East
North Height
Horizontal Total
INS
/Stereo
VO
34.639 69.681 32.296 77.816
84.252
INS
/
VO
/
MM
7.579 17.293 33.373 18.881
38.344
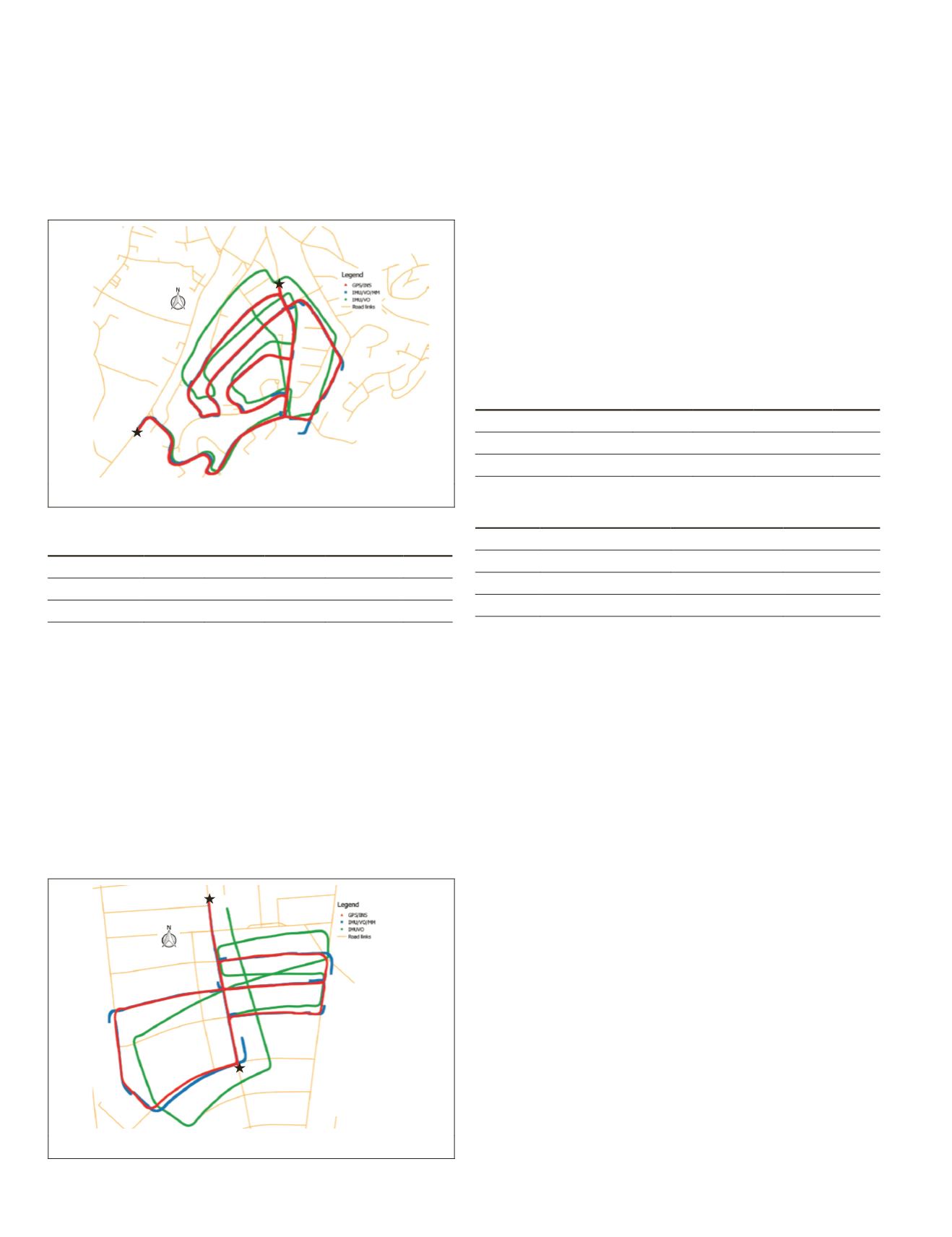
The third dataset contains 2,761 epochs (about 4.6 minutes),
of which the traveling horizontal distance is around 2,206
meters. On average, there are 78 features used in the integra-
tion. The maximum number of inliers of visual measurements
is 138 while the minimum number is 25. There are almost
no moving objects in this dataset. The trajectories of different
solutions are given in Figure 7 in different colors. Similar to
the result indicated earlier, the trajectory with the application
of map matching is not continuous because the map matching
feedback forced the drifted trajectory back to the road link. The
RMSE
of localization errors of each solution is shown in Table
6. With map matching feedback, the horizontal localization has
stable improved performance. The azimuth
RMSE
is dropping
from 8.68 degrees to 2.29 degrees and the horizontal velocity
RMSE
decreased from 1.435 m/s to 0.719 m/s.
Start Point
End Point
Figure 7. Trajectories of the third dataset.
The map matching method used in this paper would not
improve the estimation of height since the map can only
provide horizontal information. For all the datasets, the
RMSE
in height is higher when applying
INS
/Stereo
VO
/
MM
. The
reason for this might be that only the horizontal coordinates
of map matched point are used for
IMU
mechanization and
tight integration in next epoch while other states (velocity
and attitude) keep the same. This would increase the height
error slightly. However, the height accuracy is not the concern
of this paper since the horizontal position is more important
in land vehicle navigation.
The relative horizontal errors of all three datasets of each
solution are listed in Table 7. It can be seen that the tightly
coupled integration with no map matching has the largest
relative horizontal position error for the third dataset while
INS
/Stereo
VO
/
MM
solution provides more accurate and stable
performance with relative horizontal position error less than
0.4 percent in each case.
Table 6. Position
RMSE
of different methods for the second
dataset (unit: meter).
East
North Height
Horizontal Total
INS
/Stereo
VO
40.471 31.299 5.587 51.162
51.466
INS
/
VO
/
MM
7.814 3.358 7.832 8.505
11.562
Table 7. Relative horizontal position errors of different
methods.
Dataset
Distance (meters)
INS
/Stereo
VO INS
/
VO
/
MM
1
4,130
1.40%
0.34%
2
5,061
1.54%
0.37%
3
2,206
2.32%
0.39%
Conclusions
In this paper, a tightly coupled
INS
/Stereo
VO
method with
application of map matching algorithms is proposed to reduce
the quick drift of
DR
systems. The
EKF
is applied to fuse the
inertial and visual data to reduce the quick drift of individual
system. The typical 15-parameter error-state
INS
system model
is used in
EKF
with the pixel coordinate difference as mea-
surement update. However, without absolute positioning in-
formation, it is inevitable that the
INS
/Stereo
VO
system would
suffer drift eventually.
The fuzzy logic map matching algorithms are applied to
project the land vehicle localization on the correct road link.
The map matched point is further used as the position and
azimuth correction for the system. In this way, the availability
of map matching feedback can effectively reduce the system
drift by forcing the position solution to the road link. The
horizontal accuracy is greatly improved by adding the map
matching algorithms, which has been verified by the tests
in different environments. On average, the horizontal
RMSE
drops from 52.207 m to 13.843 m and the relative horizontal
position error drops from 1.75 percent to 0.37 percent.
The method proposed in this paper can be applied for
land vehicle navigation in the
GNSS
-denied environment (e.g.,
urban canyon) to bridge the
GNSS
outage since it effectively
maintains the horizontal accuracy without any
GNSS
signals.
The accuracy of the digital map used would affect the
RMSE
of final results obtained. The accuracy of the digital map used
is at the 1-meter level. The results could be further improved
if a more accurate digital map is available. Besides, the map
matching algorithms could also be improved to increase the
map matching feedbacks close to junctions, which would
further reduce the final horizontal
RMSE
.
22
January 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


