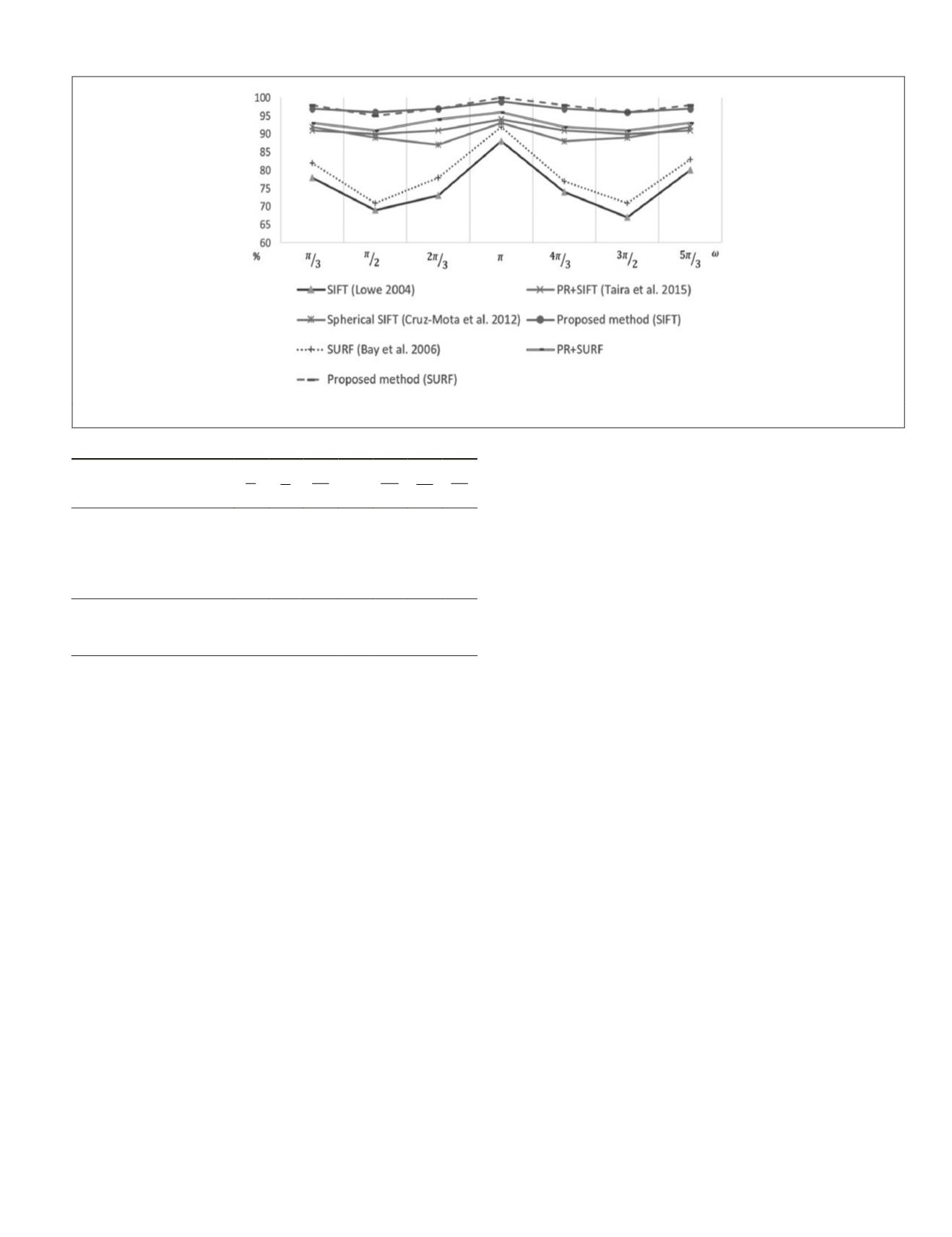
techniques designed for spherical panoramic images all yield
better results than those designed for planar images. It is
largely due to techniques designed for planar images, which
based on affine invariance do not consider the deformations
introduced by the equirectangular projection, thus deteriorat-
ing matching performance. Most of the failures occur in the
area close to the poles of the sphere.
PR+SIFT
and PR+
SURF
,
which specifically tackle spherical image distortion, yield
second high repeatability in this case. This method rotates
a spherical image to generate several subsidiary equirectan-
gular images and only extracts features in the less distorted
regions of each rotated image for matching. The matching
performance would be marginally interfered by its number
of division images. On the other hand, spherical
SIFT
drops
in repeatability when the image appearances are changed by
rotation. In contrast, regardless of the rotation angle
ω
, the
proposed method either combined with
SIFT
or
SURF
main-
tains a satisfactory repeatability score. Notably, when the
image is rotated with 180° that results in a reversed image
with the same distortion. The proposed rectified matching
achieved a perfect repeatability in regulating the rotation
discrepancy. Also, the experiment reflects the adaptability of
our method to be combined with other feature descriptors.
Figure 6 illustrates the acquired distribution of point corre-
spondences, in which dots indicate the feature locations with
index numbers. Compared to the results of
SURF
, the rectified
spherical matching finds more matches up to 24 percent and
yields better distribution as well.
As the proposed rectification explicitly generates recti-
fied image patches for each feature point based on the in-
herent characteristics of a spherical panoramic image, the
computational cost increases linearly with a number of points.
Currently, all algorithms used in this study are coded in Mat-
lab
®
and realized on a laptop Windows
™
system. The com-
putational overhead increases about 10 percent compared to
the operation time of
SURF
built in this study. Yet, the perfor-
mance of spherical image matching is improved dramatically.
Matching Between Spherical Imagery and Heterogeneous Data
The proposed spherical rectification converts distorted areas
into a similar perspective view to acquire reliable feature
descriptions. It offers the potential for applications, such as
employing hybrid camera networks for intelligent control,
surveillance, or engineering purposes. Thus, we use a
RICOH
THETA
panoramic camera and a smart cell phone camera to
capture images with different imaging geometry, scale, and
resolution in an indoor environment, and we assess the
matching performance between heterogeneous data sources.
The sizes of the panoramic and planar images are 5376 × 2688
and 3024 × 5376, respectively. We directly implement
SURF
and the rectified matching with identical parameter configura-
tion for fair comparison. In order to acquire strong features
and reliable matches, rigorous thresholds for the Fast-Hessian
detector and the ratio test are set as 1600 and 0.5, respec-
tively. As shown in Figure 7, we obtain 36.4 percent matches
from 324 detected features and the correct rate is up to 99
percent in this case, which is verified with a manual check.
As it can be observed in Figure 7(b), points (number 62 to
71) located near the pole of the sphere still can find correct
conjugate points in the planar image even though these points
are deteriorated by distortion and scale discrepancy. However,
when we loosen the thresholds as suggested in the literature,
the matching rate increases to 68 percent, but the correct rate
is down to 23 percent. Incorrect matching is largely a result
from repeated patterns of the texture within this scene, which
should be removed by a following outlier removal process.
Furthermore, the rectified spherical matching would assist
to establish the correspondence between image and lidar data
for further imagery investigation, such as image-based self-
localization and absolute image pose estimation. The com-
mon way is to convert discrete lidar point cloud into range/
intensity images and leverage image process techniques to
explore corresponding features within several planar images
automatically. This work may involve segmentation, inter-
polation, and iterative searching in terms of the point cloud,
requiring a high computational cost. Therefore, in this paper,
Figure 5. Trends of repeatability under
ω
rotation.
Table 2. Repeatability scores (%).
Rotating angle
ω
π
3
π
2
2
3
π
π
4
3
π
3
2
π
5
3
π
SIFT
(Lowe, 2004)
78 69 73 88 74 67 80
PR+SIFT
(Taira
et al.
, 2015) 91 90 91 94 91 90 91
Spherical
SIFT
(Cruz-Mota
et al.
, 2012)
92 89 87 93 88 89 92
Proposed method (
SIFT
)
97 96 97 99 97 96 97
SURF
(Bay et al., 2006)
82 71 78 92 77 71 83
PR+SURF
93 91 94 96 92 91 93
Proposed method (
SURF
)
98 95 97 100 98 96 98
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
January 2018
29


