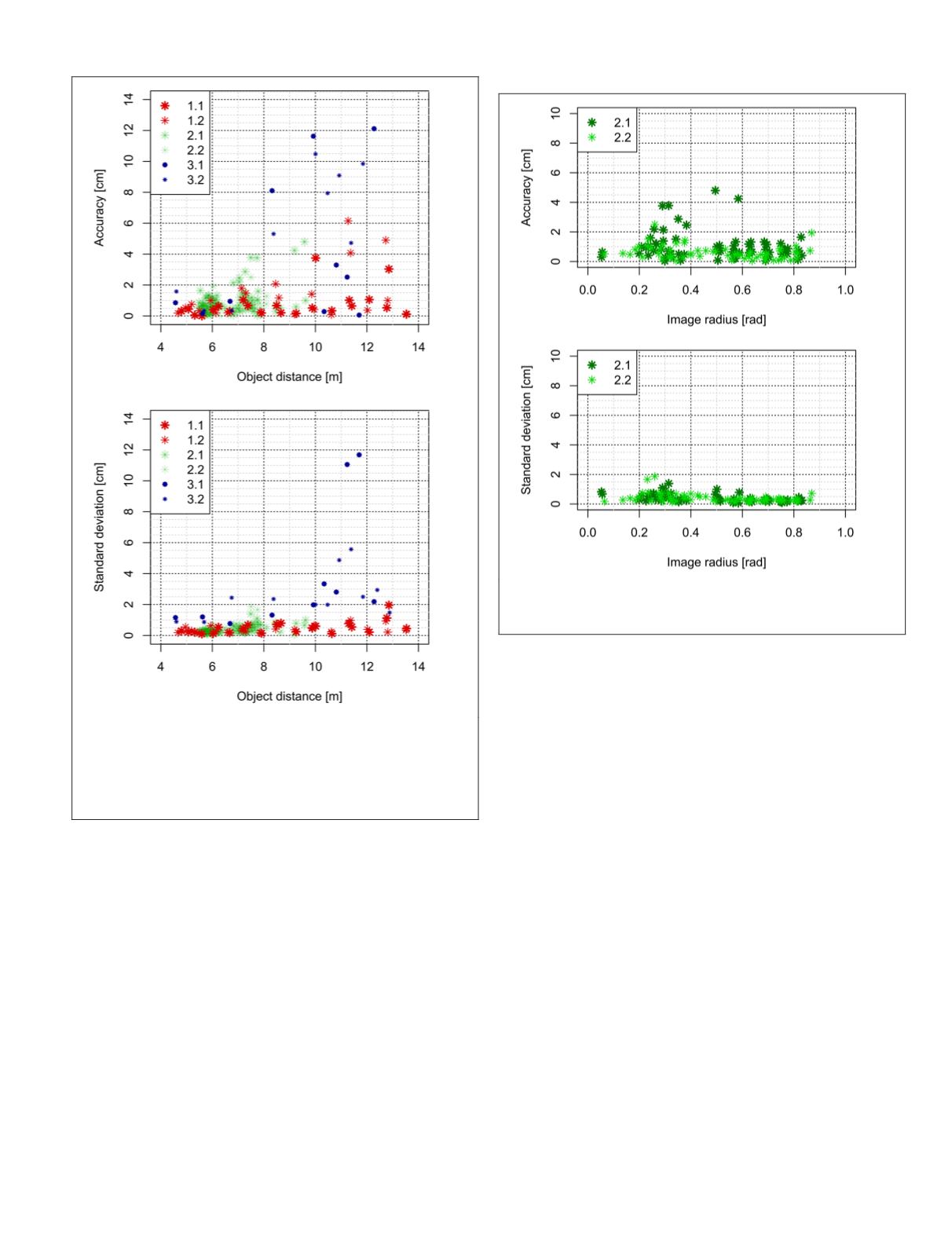
the accuracy and even a smaller distance-dependent decrease
of precision. The accuracies vary between 0.1 cm and 6.2 cm
and the precision, represented by standard deviations, varies
between 0.1 cm and 2.0 cm. By contrast, in the third test site
(3.1 & 3.2), a significant distance-dependent decrease of both
the accuracy and the precision occurred with a variation
from 0.5 cm to 12.1 cm. Reasons are the uncertainty in point
definition which influences the matching accuracy and image
measurement accuracy as well as the larger range of depths.
Furthermore, we evaluated the accuracy and the precision
of 3D distances in the second test field (2.1 & 2.2) with respect
to the image radius. In the equidistant projection model, this
is equal to an angle from the principal point (see Figure 13).
The lower noise in the second image is striking, presumably
due to different lighting conditions. In the second image,
four points were omitted due to stronger solar radiation and
overexposure of façade parts. However, no significant influ-
ence of the image radius could be determined. Possibly, due
to the precise camera calibration and the well suited projec-
tion model.
Evaluation of Absolute Accuracy
For the evaluation of absolute 3D point accuracies, we com-
pared photogrammetric point measurements in object space
with reference coordinates. Additionally to the error sources
of relative measurements, trajectory errors and the boresight
alignment calibration affect measured 3D point coordinates.
Figure 14 depicts that the accuracy of 3D points increases
with object distance. In contrast, the increase of standard de-
viation is much smaller, except for a few outliers. The accura-
cies vary between 1.2 cm and 13.8 cm. Additional integrated
georeferencing could reduce the position part of the trajectory
error and improve the absolute accuracy.
Again, as in the relative accuracy evaluation, no significant
radial influence has been determined, even with all additional
error sources (see Figure 15).
In comparison with previous investigations (Burkhard
et
al
., 2012), which were performed with both HD and 11
MP
ste-
reo camera configurations as front systems, the results of our
investigations do not differ significantly. Consequently, we
reached the same accuracy level with our new fisheye stereo
camera configuration as with the original 11
MP
front pinhole
stereo camera system. Furthermore, there was no significant
error increase depending on the image radius. Overall, we
consider the fisheye stereo systems as equivalent to the per-
spective stereo systems in terms of accuracy.
Automated Reconstruction of 3D Models of the Urban Road Environment
The main advantage of our novel camera configuration is
its nearly 360° stereo coverage and its capability to capture
highly overlapping image sequences. These highly redundant
and accurately georeferenced multi-view sequences should
be ideal for the automatic generation of detailed 3D models
of the urban road environment. Cavegn and Haala (2016)
Figure 13. Accuracies and precision (1
σ
) of 124 3D distances
with respect to image radius. Each 3D distance bases on
eight independent measurements.
Figure 12. Accuracies and precision of 190 3D distances with
respect to object distance. Each 3D distance bases on eight
independent measurements. Here, the standard deviation
(1
σ
) depicts the precision or the repeatability of the measure-
ments, while the accuracy indicates the agreement between
the mean 3D distance and the ground truth 3D distance.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
June 2018
353


