image-based and featured forward looking stereo cameras
with horizontal baselines. In order to cover a wider field-of-
view up to a full 360° coverage, more recent systems feature
either multiple stereo cameras (Cavegn and Haala, 2016; Meil-
land
et al
., 2015) or hybrid configurations consisting of stereo
cameras and panorama cameras in combination with lidar
sensors (Paparoditis
et al
., 2012).
Specific 360° stereovision mobile mapping systems
include the Earthmine Mars Collection System (Earthmine,
2014) with a vertical mast and four pairs of cameras, each pair
forming a vertical stereo base. In contrast, Heuvel
et al
. (2006)
presented a mobile mapping system with a single 360° camera
configuration, following the virtual stereo base approach.
Since stereo bases are calculated based on vehicle movement,
its accuracy strongly depends on the relative orientation be-
tween two different camera positions. However, virtual stereo
bases cannot achieve the same accuracy as rigidly mounted
and well pre-calibrated ones. Noteworthy examples among
the many 360° camera systems in robotics include Meilland
et al
. (2015), who introduced a spherical image acquisition
system consisting of three stereo systems, mounted either in a
ring configuration or in a vertical configuration. The vertical
configuration is composed of three stereo pairs mounted back-
to-back, whereby each triplet of cameras is assumed to have
a unique center of projection. This allows using standard
stitching algorithms when building the photometric spheres,
but sacrifices geometric accuracy. Lui and Jarvis (2010) intro-
duced alternative 360° stereo systems based on catadioptric
optics. With the rapid evolution of virtual reality headsets and
360° videos on platforms such as Youtube
®
, we see a rapidly
growing number of 360° stereo cameras from consumer grade
to high end (e.g., Nokia Ozo). While providing 360° stereo
coverage, the featured stereo baselines are typically small and
are thus not suitable for large-scale measuring applications.
For mobile mapping systems with high accuracy demands,
moving from standard stereo systems with their proven cam-
era models, calibration procedures and measuring accuracies
(Burkhard
et al.
, 2012) to 360° stereo configurations with mul-
tiple fisheye cameras poses some new challenges. Abraham
and Förstner (2005) provide a valuable summary and discus-
sion of camera models for fisheye cameras and respective
epipolar rectification methods. They introduce two fisheye
models with parallel epipolar lines: the epipolar equidistant
model and the epipolar stereographic model. Kannala and
Brandt (2006) further introduce a general calibration model
for fisheye lenses, which approximates different fisheye mod-
els with Fourier series.
There are numerous works on stereo processing and 3D
extraction using panoramic and fisheye stereo. These include
investigations on the generation of panoramic epipolar images
from panoramic image pairs by Chen
et al
. (2012). Schneider
et
al
. (2016) present an approach for extracting a 3D point cloud
from an epipolar equidistant stereo image pair and provide
a functional model for accuracy pre-analysis. Luber (2015)
delivers a generic workflow for 3D data extraction from stereo
systems. Krombach
et al.
(2015) provide an excellent evalu-
ation of stereo algorithms for obstacle detection with fisheye
lenses, e.g., with a particular focus on real-time processing.
Finally, Strecha
et al
. (2015) perform a quality assessment of
3D reconstruction using fisheye and perspective sensors.
Despite the widespread use of mobile mapping systems,
there are relatively few systematic studies on the relative and
absolute 3D measurement accuracies provided by the different
systems. A number of studies investigate the precision and ac-
curacy of mobile terrestrial laser scanning systems (e.g., Barber
et al
., 2008; Haala
et al
., 2008; Puente
et al
., 2013). Barber
et
al
. (2008) and Haala
et al
. (2008) demonstrate 3D measurement
accuracies under good
GNSS
conditions in the order of 3 cm.
Only few publications investigate the measurement accuracies
of vision-based mobile mapping systems. Burkhard
et al
.
(2012) obtained absolute 3D point measurement accuracies of
4 to 5 cm in average to good
GNSS
conditions using a stereovi-
sion mobile mapping system. Eugster
et al
. (2012) demon-
strated the use of stereovision-based position updates for a
consistent improvement of absolute 3D measurement accura-
cies from several decimeters to 5 to 10 cm for land-based mo-
bile mapping even under poor
GNSS
conditions. Cavegn
et al
.
(2016) employed bundle adjustment methods for image-based
georeferencing of stereo image sequences and consistently ob-
tained absolute 3D point position accuracies of approx. 4 cm.
Geospatial 3D Imagery
In our earlier publication (Nebiker
et al
., 2015), we proposed
to treat geospatial 3D imagery or “Geospatial 3D Image Spac-
es” as a new type of a native urban model, combining radio-
metric, depth, and other spectral information. This concept
is technology-independent with regard to depth generation.
In this contribution, we exploited dense stereo image match-
ing for reconstruction of the depth information. Nevertheless,
other technologies (e.g., range imaging or lidar) with their
respective strengths and weaknesses could be used for image
depth generation. We prefer the more general term 3D imagery
to
RGB-D
imagery, since the concept is applicable to any com-
bination of spectral channels, including near infrared (
NIR
) or
thermal infrared (
TIR
) imagery. We furthermore postulated that
such a model should fulfill the following requirements:
• It shall provide a high-fidelity metric photographic rep-
resentation of the urban environment, which is easy to
interpret and which can be augmented with existing or
projected GIS data;
• The RGB and the depth information shall be spatially and
temporally coherent, i.e., the radiometric and the depth
observation should ideally take place at exactly the same
instance (this could also be expressed as WYSIWYG =
what you see is what you get);
• The depth information shall be dense, ideally providing a
depth value for each pixel of the corresponding radiomet-
ric image;
• Image collections are usually ordered, e.g., in the form of
image sequences, for simple navigation and shall effi-
ciently be accessed via spatial data structures;
• The model shall support metric imagery with different
geometries, e.g., with perspective, panoramic or fisheye
projections; The model shall be easy-to-use and shall at
least support simple, robust and accurate image-based 3D
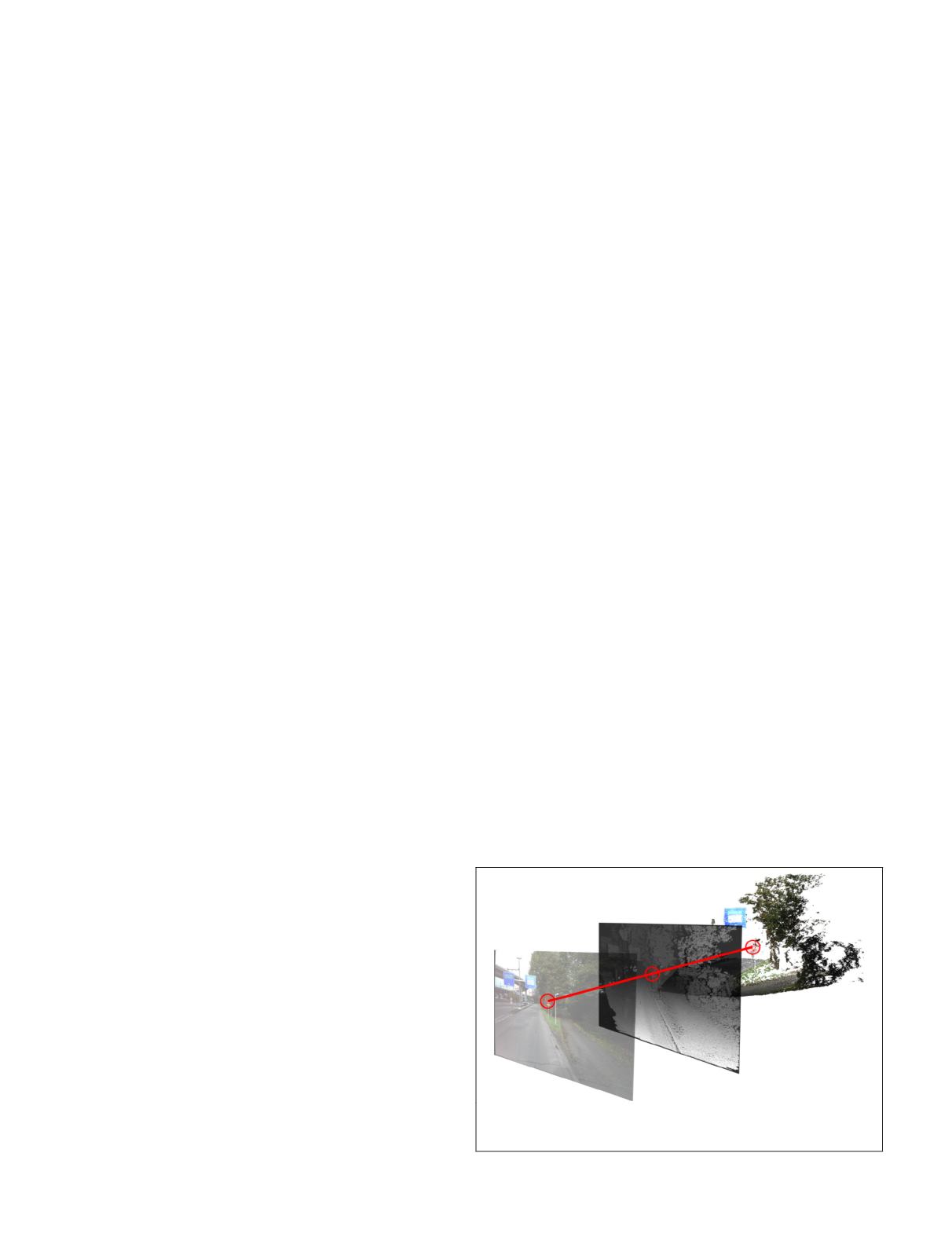
measurements using enhanced 3D monoplotting (see Figure
2); and the model shall provide measures to protect privacy
Figure 2. Principle of a geospatial 3D image with
RGB
image
(left), co-registered dense depth map (middle) and its represent-
ation in object space as a colored 3D point cloud (right).
348
June 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


