On a Novel 360° Panoramic
Stereo Mobile Mapping System
Stefan Blaser, Stephan Nebiker, and Stefan Cavegn
Abstract
Image-based mobile mapping systems enable the efficient
acquisition of georeferenced image sequences, which can
later be exploited in cloud-based 3D geoinformation services.
In order to provide a 360° coverage with accurate 3D measur-
ing capabilities, we present a novel 360° panoramic stereo
camera configuration. By using two 360° panorama cameras
tilted forward and backward in combination with convention-
al forward and backward looking stereo camera sytems, we
achieve a full 360° multi-stereo coverage. We furthermore de-
veloped a new mobile mapping system based on our proposed
approach, which is operational and fulfills our high accuracy
requirements. We successfully implemented a rigorous sensor
and system calibration procedure, which allows calibrat-
ing all stereo systems with a superior accuracy compared to
that of previous work. Our study delivered absolute 3D point
accuracies in the range of 2 to 8 cm and relative accura-
cies of 3D distances in the range of 1 to 5 cm. We achieved
these results in a challenging urban area. Furthermore, we
automatically reconstructed a 3D city model of our study
area by employing all captured and georeferenced mobile
mapping imagery. The result is a highly detailed and almost
complete 3D city model of the street-level environment.
Introduction
In recent years, image-based mobile mapping has evolved
into a highly efficient and accurate mapping technology. It
enables capturing an enormous amount of metric image data
in a short time period with no or just minimal road traf-
fic interference. First experiments with stereovision-based
mobile mapping, such as the
GPSVan
(Novak, 1991) or the
VISAT
system (Schwarz
et al
., 1993), date back some 25 years.
Recent progress in positioning and imaging sensors, on-board
data storage, algorithms and computing technologies such as
high-performance cloud computing have enabled very power-
ful stereovision mobile mapping approaches. Investigations in
mobile mapping at the Institute of Geomatics (
IGEO
), Univer-
sity of Applied Sciences and Arts Northwestern Switzerland
(
FHNW
) started in 2009 with the development of an image-
based mobile mapping system (
MMS
) which has since evolved
into a multi-stereo camera system (Burkhard
et al
., 2012).
This system generation is extensively used for commercial
large-scale road and rail infrastructure management. Extend-
ing the multi-stereo configuration to a full 360° 3D coverage
for future street-level imaging services in urban areas with
high buildings and numerous superstructures proved to be
inefficient and triggered new investigations. Existing 360°
panoramic stereo mobile mapping systems such as those of
Heuvel
et al
. (2006) or Earthmine (2014) did either not fulfill
the accuracy requirements or stood in conflict with national
privacy laws, which, e.g., in Switzerland, prohibit street-
level image acquisition from higher than 2 m above ground.
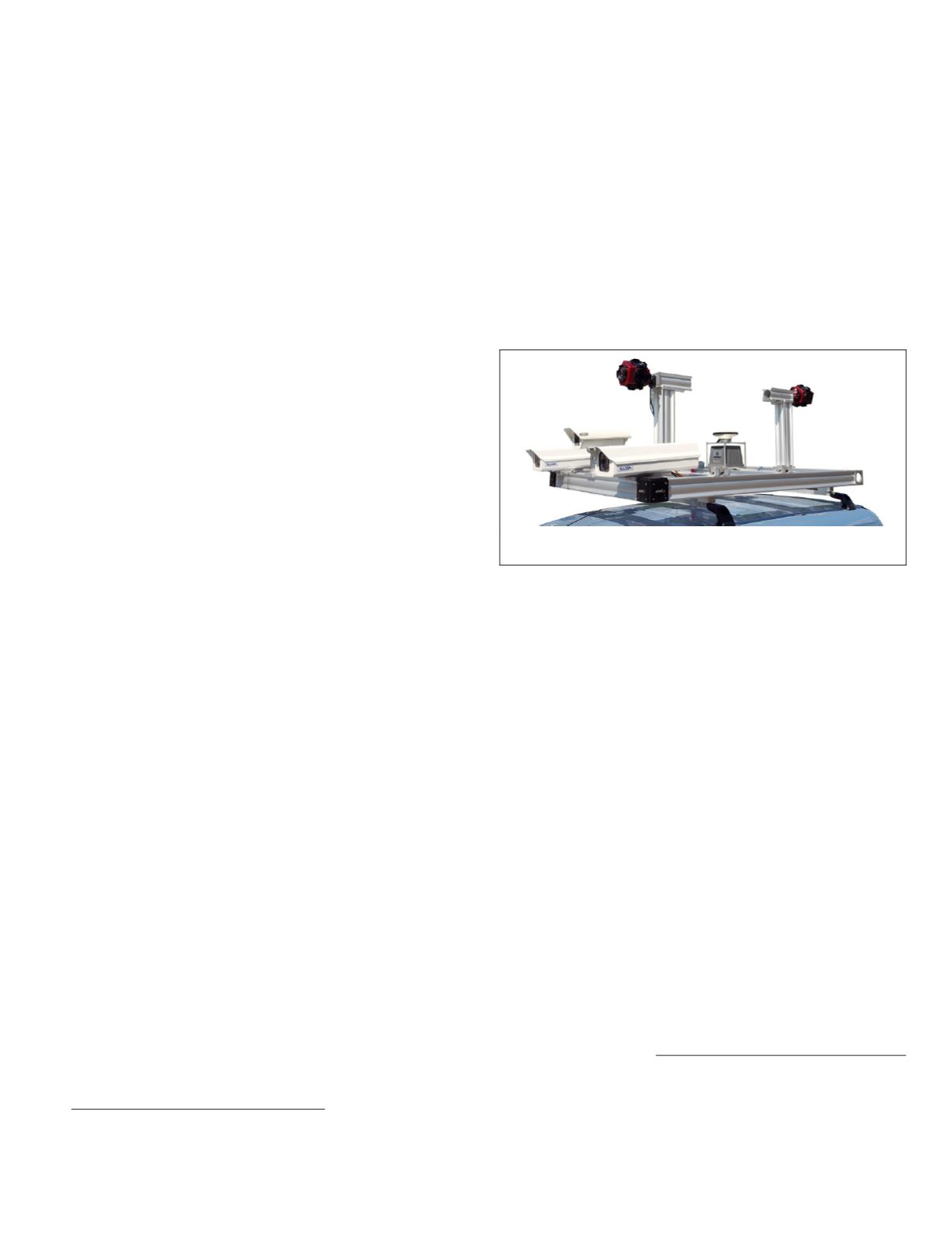
In the following, we introduce a novel 360° panoramic
stereo camera configuration, which uses two multi-head
360° panorama cameras, tilted forward and backward by 90°,
respectively (see Figure 1). This system offers large, rigid
stereo bases for all viewing directions while permitting image
acquisition at heights compliant with strict privacy laws.
Figure 1. System overview demonstrating our novel stereo
panorama camera setup.
The goals of the following investigations were:
• to design a 360° stereo system for a mobile mapping
vehicle suitable for highly-accurate measurement and
infrastructure management tasks;
• to mechanically and electronically integrate 15+ imaging
sensors with different camera models;
• to develop a suitable and accurate calibration procedure
for a multi-head mobile mapping system comprising both
pinhole and fisheye sensors;
• to design and implement a processing workflow for
image-based and integrated georeferencing as well as
for the efficient and accurate depth map extraction from
fisheye stereo;
• and last, but not least, to evaluate the empirical accuracy
of the system with the goal of obtaining 3D measuring ac-
curacies equivalent to those achieved with conventional
pinhole stereo systems, e.g., by Burkhard
et al
. (2012).
In the following, we first discuss related work in the next sec-
tion and then introduce the concept of 3D geospatial imagery.
Next, we present our mobile mapping system with its overall
system calibration, followed by our implemented processing
workflow for fisheye stereo imagery. Following the introduc-
tion of our study area, we provide a quality assessment of the
processed data.
Related Work
The first 3D mobile mapping systems in the late 80s and early
90s (Novak, 1991; Schwarz
et al
., 1993) were exclusively
FHNW University of Applied Sciences and Arts Northwestern
Switzerland, Gruendenstrasse 40, 4132 Muttenz, Switzerland
(
).
Photogrammetric Engineering & Remote Sensing
Vol. 84, No.6, June 2018, pp. 347–356.
0099-1112/18/347–356
© 2018 American Society for Photogrammetry
and Remote Sensing
doi: 10.14358/PERS.84.6.347
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
June 2018
347


