performed first investigations comprising qualitative and
quantitative analysis with the forward as well as a back-right
and a left looking stereo system. In our experiments, all im-
ages captured from all sensors were included. We previously
removed distortion and principal point errors in order to fa-
cilitate the 3D reconstruction process. Furthermore, we calcu-
lated exterior orientation parameters for all images using the
calibrated
BA
and ROP. We masked unwanted fragments of the
mobile mapping vehicle in the images. We created the urban
model with the 3D reconstruction software ContextCapture
from Bentley, which also supports a fisheye camera model.
For bundle block adjustment, we fixed the calibrated interior
orientation parameters while we re-estimated the exterior
orientation parameters (Ackermann and Studer, 2016).
The result of the automatic 3D reconstruction process is
a highly detailed 3D model of the urban road environment
as shown in Figure 16, which almost perfectly represents
even the detailed façades of the buildings from the classicist
epoch. The street with unfavorable geometric and different
lighting conditions has been modeled completely as well. As
expected, roof reconstruction from the street-level imagery
is incomplete and noisy. In the future, we will close this gap
by combining
MMS
images with aerial images as earlier on
proposed by Nebiker
et al
. (2012), and thus extend our highly
detailed 3D models of the urban road environments towards
complete 3D city models.
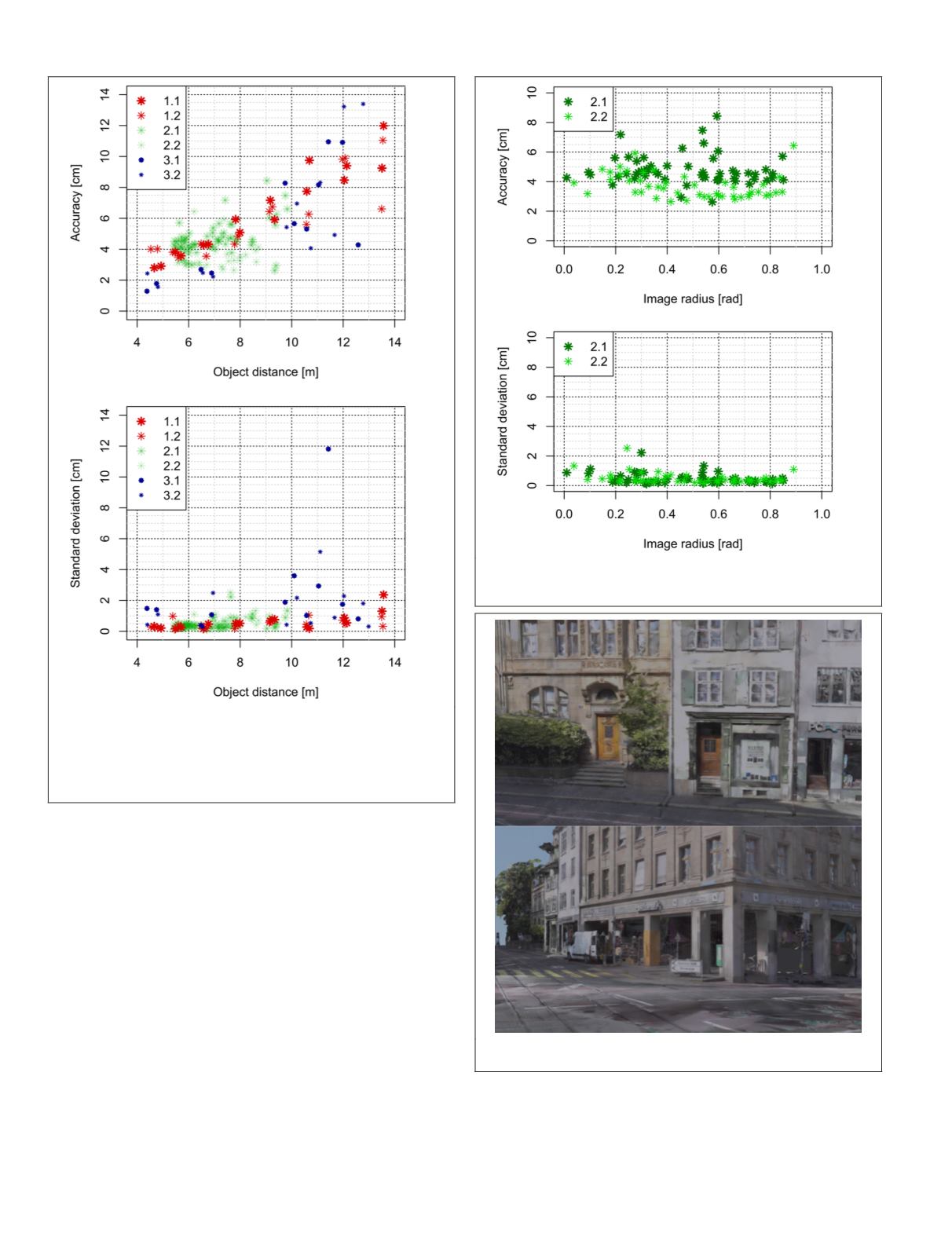
Figure 15. Accuracies and precision (1
σ
) of 102 3D points
with respect to image radius. Each 3D point bases on eight
independent measurements.
Figure 16. Samples showing the reconstructed 3D model of
the urban road environment.
Figure 14. Accuracies and precision of 158 3D points with
respect to object distance. Each 3D point bases on eight
independent measurements. Here, the standard deviation
(1
σ
) depicts the precision or the repeatability of the
measurements, while the accuracy indicates the agreement
between the mean 3D point and the ground truth 3D point.
354
June 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


