for high spatial resolution remote sensing images, is difficult
(Johnson and Xie, 2013). Therefore, the supervised evaluation
method is limited in application to a certain extent.
Object Matching
After the segmentation reference dataset is established, it is
necessary to extract the overlapping object set,
S
i
= {
s
i
;
area
(
s
j
∩
r
i
)
≠
0}, which constitutes a spatial overlap relationship with
each reference object from the segmentation object set,
S
=
{
s
j
;
j
= 1 …
m
}, corresponding to the segmentation method.
Extracting the overlapping object set from segmentation object
set is only a coarse matching process, which only considers
the spatial topological relationship between reference objects
r
i
and the segmentation objects
s
j
. Ideally, each reference
object should have a
one-to-one
relationship with its corre-
sponding object (Figure 2b). However, in most cases, a large
number of objects in the overlapping object set may have an
overlap relationship with multiple reference objects. There-
fore, it is necessary to implement a filter process for the over-
lapping object set in order to obtain the final corresponding
object set
S
*
i
= {
s
j
;
j
= 1 …
v
,
v
∈
m
}. The most widely used filter
criteria are the ratio of the object area and the spatial location
of object.
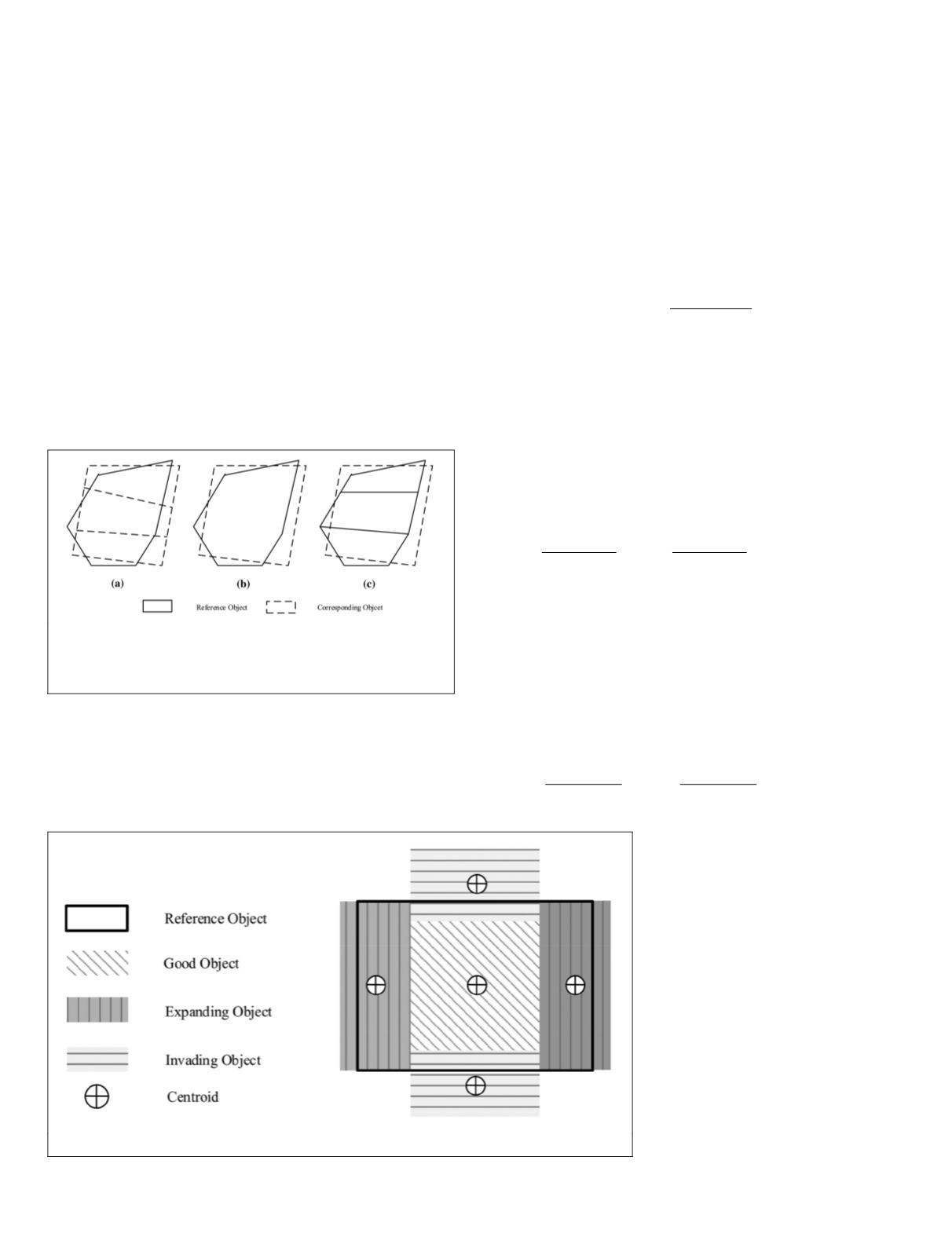
Figure 2. Arithmetic relationships between a reference
object and the corresponding object according to Liu
et
al
. (2012): (a) a
one-to-many
relationship, (b) a
one-to-one
relationship, and (c) a
many-to-one
relationship.
Lucieer and Stein (2002) proposed the Maximum Over-
lapping Area Method which denotes the overlapping object
that has the largest overlapping area with the reference object
as the corresponding object. This method matches only one
overlapping object to each reference object, and is widely
used due to its simple principle and low computation com-
plexity. However, the reliability of the matching result will
be affected if the ratio of overlapping is too small because the
corresponding object will be an under-segmented object of
corresponding.
S
*
i
Max
= {
s
j
; max(
area
(
r
i
∩
s
j
)),
s
j
∈
S
i
}
(1)
Zhao
et al
. (2015) improved the Maximum Overlapping
Are
a
Method by defining a parameter which reflects the extent
of under-segmentation, the
Under-Segmentation Ratio (
USR
)
.
This parameter is used to restrict the object matching of the
under-segmented objects. The subsequent evaluation process
based on this matching result could be more objective.
USR
max r s
s
i
j
j
= −
(
)
1
∩
(2)
Liu
et al
. (2012) put forward the One-Sided 50% Method
to extract corresponding objects from overlapping objects
used for those overlapping objects whose overlapping area is
more than 50% either with itself or in corresponding objects.
However, this method is not suitable for many segmentation
relationships, as each reference object may be matched to
several corresponding objects. For example, if the reference
object completely contained multiple overlapping objects,
there is neither over-segmentation nor under-segmentation in
the evaluation process.
S s
area r s
area s
area r s
area r
s
i
j
i
j
j
i
j
i
j
*
:
%
%,
1
50
50
=
(
)
( )
>
(
)
( )
>
∪
∩
∩
∈
S
i
(3)
Yang
et al
. (2015a) improved on the One-Sided 50% Meth-
od with the Two-Sided 50% Method. The corresponding ob-
jects are defined as overlapping objects when the overlapping
area is more than 50% both with itself and the correspond-
ing objects. Compared to the One-Sided 50% Method, the
Two-Sided 50% Method achieved a one-to-one relationship
between the reference object and the corresponding object,
enabling the ability to select the most applicable correspond-
ing object from several One-Sided 50% corresponding objects.
S s
area r s
area s
area r s
area r
s
i
j
i
j
j
i
j
i
j
*
2
50
50
=
(
)
( )
>
(
)
( )
>
:
%
%,
∩
∩
∩
∈
S
i
(4)
Schöpfer and Lang (2006)
proposed the object-fate matching
method. The overlapping objects
were divided into three types ac-
cording to the area ratio and the
spatial location of the reference
objects and overlapping objects
(Figure 3): “good”, “expanding”,
and “invading” objects. Good and
Expanding objects together con-
stitute the corresponding objects.
Good objects fall into the boundary
of the reference object completely.
Expanding objects exceed the
boundary of the reference object,
but its borders fall into the range of
the reference object, and the over-
lapping area between an expanding
object and the reference object is
more than 50% of the expanding
Figure 3. Illustration of the object-fate matching method according to Cheng
et al
. (2014).
632
October 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


