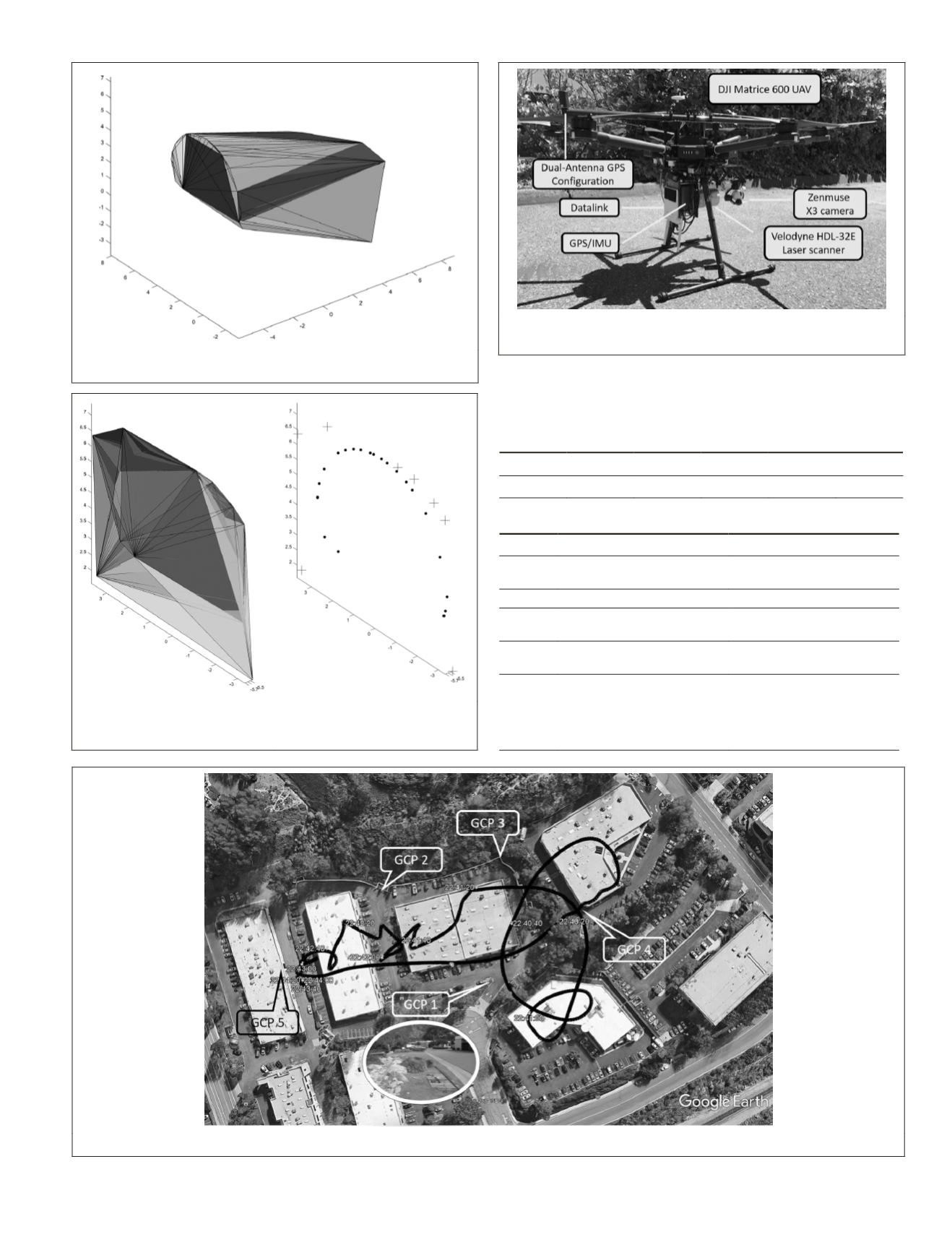
Figure 8. Tetrahedrons formed between
TLS
and lidar point
clouds before registration
Figure 10. Navigation sensors mounted on the
DJI
Matrice
M600
UAV
.
Table 1. Boresight angles and lever-arm offsets computed
using Volume Minimization algorithm.
α
β
γ
Δ
T
L
b
(
X
)
Δ
T
L
b
(
Y
)
Δ
T
L
b
(
Z
)
-33.67˚
33.81 ˚
-127.46 ˚ 0.617 m -0.012 m 0.552 m
Table 2. System sensor model and configuration.
Sensors
Model
Configuration
GPS • Dual frequency
• Dual antenna configuration
• RTK service
IMU • MEMS IMU
• Internal
Laser
scanner
• Velodyne HDL-32E
• Time stamping
• Interface controlling
Processor • GPS/IMU Kalman filter
• GPS/IMU/Laser integration
• Real-time lidar direct-
georeferencing
Datalink
• 900 MHz.
• Real-time point cloud
streaming
• Real-time monitoring of
the coverage
• RTK
Figure 11. Flight plan with multiple cross paths on the area of interest and
GCP
.
Figure 9. Minimized volume (left) and registered point
cloud (right) after recovering transformation parameters that
refer to boresight parameters
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
October 2018
625


