McGhee 1986; Gleichman
et al.
1988; Tchoryk
et al.
1991;
Everett 1995; Flatscher
et al.
1999; Gage 1995; Matthies 1999;
Nilsson 2010). Feeding into this were sensors that came out of
the Environmental Research Institute of Michigan (
ERIM
) and
the Jet Propulsion Laboratory (
JPL
) at the California Institute of
Technology (Matthies 1999; Roland and Shiman 2002).
The technologies developed between 1966 and1997 were not
created with an intention to compete with survey equipment
like total positioning stations, as they do in the marketplace
today. The driving force behind their refinement was govern-
ment- and university-led initiatives like the Surveyor program
and the Carnegie Mellon University (
CMU
) Navigation Labora-
tory (NavLab) (Everett 1995; Roland and Shiman 2002). This
continued to be the case until commercialization took place in
the 1990s.
Prior to the development of tripod-mountable systems for
surveying, midrange
TLS
solutions had been used on satellites,
space-exploration vehicles, robots like Shakey or Odex I, and
autonomous land vehicles (Moravec 1983; Kweon, Hoffman
and Krotkov 1991; Everett 1995; Matthies 1999). It was a form
of computer vision used for navigation and terrain modeling,
as an alternative to passive video and stereo camera-based
navigation like structure from motion (Besl 1988; Tchoryk
et
al.
1991; Amann
et al.
2001). For example, the Adaptive Sus-
pension Vehicle (
ASV
) and Autonomous Land Vehicle (
ALV
)
projects, which were funded by
DARPA
, both used laser scan-
ners as part of their guidance systems (Waldron and McGhee
1986; Gleichman
et al.
1988; Song and Waldron 1989). Again,
they were used to guide vehicles remotely through war zones
and other environments hazardous to humans.
Shakey
Running parallel to the Surveyor program (1966–1968) was
the
DARPA
-funded artificial-intelligence project called Shakey
(1966–1972). This four-wheeled robot was developed by the
Stanford Research Institute (Nilsson 1984). It incorporated both
active and passive systems of sensing into its design, which
made it autonomous in a specially designed environment (Nils-
son 1969, 1984, 2010; Moravec 1983; Gage 1995). Shakey could
use a vidicon television camera or a custom-built laser range
finder (with rotating mirror) to determine its location (Nilsson
1984; “Shakey Images” n.d.). Its design laid the foundation for
TLS
in general in robotic engineering at the Stanford Research
Institute, as well as at
CMU
via Hans Moravec (Moravec 1983;
Gage 1995). Shakey currently resides in the Computer History
Museum in Mountain View, California (“Shakey” 2018).
Space, Defense, and Autonomous Vehicles
By 1977, a
ToF
-based scanning device, the Scanning Laser
Rangefinder, had been developed by
JPL
(Lewis and Johnston
1977; Everett 1995). The project identified limitations based
on accuracy, how these limitations might be mitigated, and
laid the groundwork for tripod-based
ToF
solutions (Lewis
and Johnston 1977). Yoshiaki Shirai and his team at the
Electrotechnical Laboratory in Tokyo had also developed a
slit projection-based method for range-finding in the period
after Shakey but before the work at
JPL
. This was for the vision
system in their
ETL-ROBOT
, with point information represented
in a scan line-based pattern (Shirai 1972). Similar triangula-
tion-based methods are discussed later in the section called
The Point Cloud
– via the early
CH
based work of the Coig-
nard family (Figure 6) and (separately) the Scannerless Range
Imager. The latter was developed at Sandia National Laborato-
ries in New Mexico, and was built to run on a Motorola 68000
computer processing unit-based Amiga computer (Sackos
et
al.
1998).
Hans Moravec also explored navigation and obstacle
avoidance at the Stanford Research Institute around the same
period as the
JPL
Scanning Laser Rangefinder, 1973 to 1981,
(Moravec 1983; Gage 1995). He used a stereo vision system on
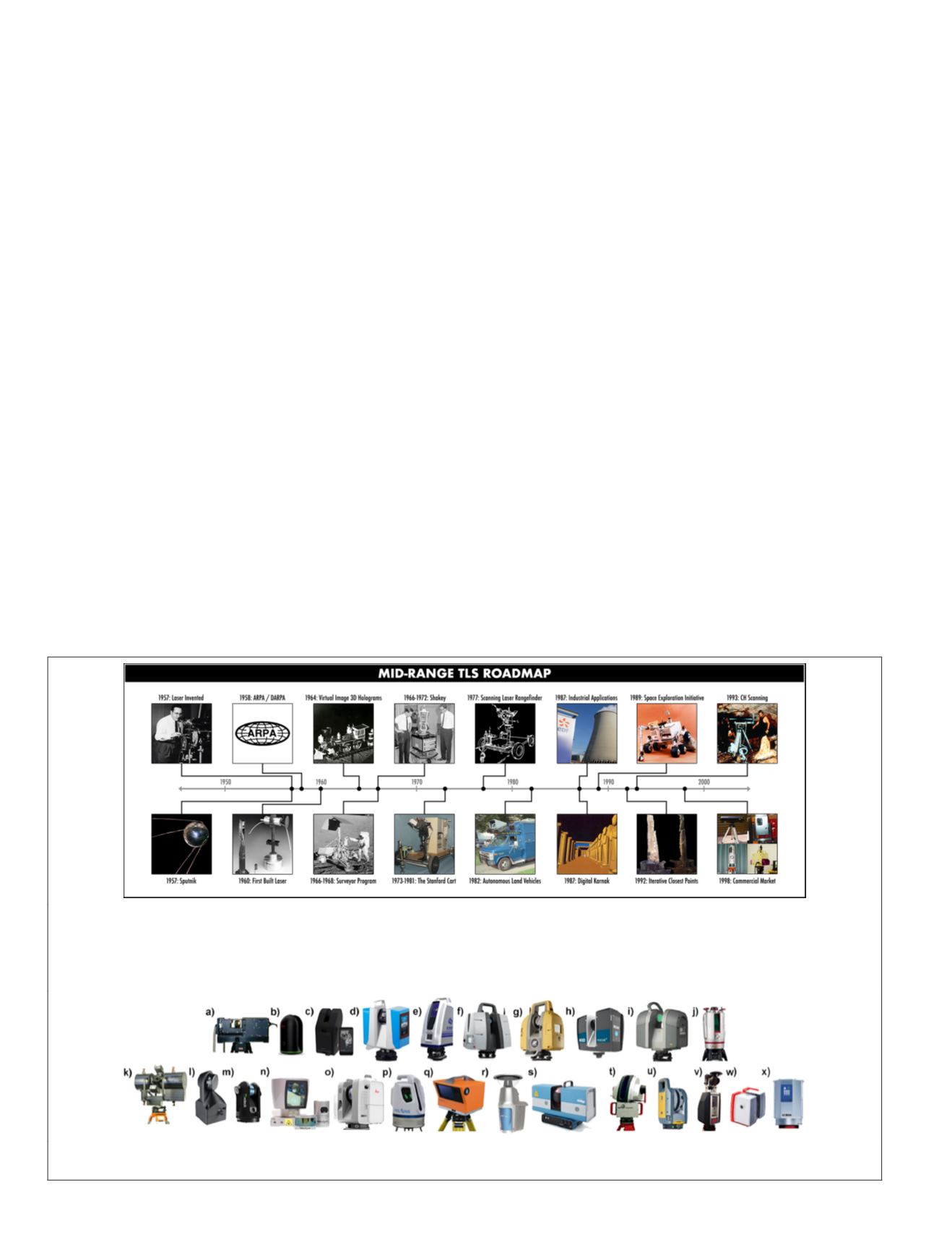
Figure 1. (a) The road map of midrange terrestrial laser scanning outlines the transition from vehicle-based systems, which
started out as research-funded projects focused on space and defense applications. These solutions eventually crossed over
to commercial tripod-based applications for geodetic and surveying-based uses in 1998. They were, however, first used for
industrial and cultural heritage applications in the build up to a market forming around the technology.
ARPA
= Advanced
Research Projects Agency;
CH
= cultural heritage;
DARPA
= Defense Advanced Research Projects Agency.
Figure 1. (b) Midrange TLS solutions available at time of publication. They came out of 11 different countries, 18 different
companies, and a research laboratory.
420
July 2020
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


