The
ALV
program was a turning point for
PS
laser scanning.
ERIM
’s sensor, which collected sample range data for terrain-
modeling purposes, was a catalyst that brought together highly
skilled research teams from
CMU
, Martin Marietta Aerospace,
and Sandia National Laboratories (Gleichman
et al.
1988;
Thorpe
et al.
1991a; Thorpe
et al.
1991b). Their efforts refined
PS based hardware and software solutions, making them more
efficient at collecting spatial information. For example, the
ALV
project led to the development of computers small enough
to fit inside a vehicle – in order to process
ERIM
data in real
time. The
ALV
project also laid the groundwork for sustained
research and development through
CMU
as the computer-vision
partner, as well as kept the momentum going for space-driven
initiatives like the Space Exploration Initiative (
SEI
) (Thorpe
et al.
1991a; Thorpe
et al.
1991b).
PS
solutions were on the
cusp of being refined for industrial application via the NavLab
initiative by the late 1980s.
Several
ALV
contractors acquired
ERIM
scanners in 1985
(Gleichman
et al.
1988).
CMU
used its scanner, along with
other systems built by Perceptron and Odetics, as part of the
NavLab autonomous vehicle initiative that began in 1986
(Kweon
et al.
1991; Hebert and Krotkov 1992; Kweon and
Kanade 1992; Kelly 1994).
In particular, the NavLab explored and refined the applica-
tion of road vehicles modified for remote driving in urban or
city environments. There was even a direct link to the
ALV
project through Takeo Kanade, Pradeep Khosla, and Chuck
Thorpe (Chuck Thorpe, email to author, January 19, 2015).
Kanade and Khosla were developing a robotic arm for a proj-
ect managed by Clint Kelly III, the same person overseeing
Thorpe’s work on the
ALV
. Kanade, Khosla, and Thorpe went
on to become K
2
T. The NavLab continued to produce autono-
mous and semiautonomous vehicles at the time of publication
of this article; such vehicles, though, were first designed by
the Robotics Institute at
CMU
and then the
CMU
NavLab.
PS
technologies stemming from this branch of
CMU
research
include those produced by K
2
T/Quantapoint (
USA
) and Zoller
and Fröhlich (Germany; Hebert and Krotkov 1992; Froehlich,
Mettenleiter and Haertl 1997, 1998; Hancock, Hoffman
et al.
1998; Hancock, Langer
et al.
1998). iQvolution/Faro (Germa-
ny) went on to create its first
PS
systems in 2003–2004 (Feitz
2003; “iQvolution Announces the iQsun” 2004). By 1998,
K
2
T had released a scanner called the SceneModeler, after the
research-driven Franklin in 1997 (Hancock
et al.
1998b; Cho
2000), and changed its name to Quantapoint in 1999 (“Quan-
tapoint lands $4 million” 2001). Christoph Fröhlich (Z+F) and
Eric Hoffman (K
2
T/Quantapoint) had also conducted
CH
scans
of the Eastern sculpture niche of the College of Fine Arts at
CMU
seen in Figure 4 (Froehlich
et al.
1997, 1998; Hancock
et al.
1998b). The Franklin system used for these scans was
a joint effort between
CMU
, Z+F, and K
2
T. It was partly spon-
sored by the Ben Franklin Technology Center of Southwestern
Pennsylvania, from which the Franklin took its name (Han-
cock
et al.
1998b). Other contributors included the US Depart-
ment of Transportation and
DARPA
under the auspices of the
Technology Enhancements for Unmanned Ground Vehicles
(
UGV
) project (Hancock
et al.
1998b).
When Timing Was Right
The second of the four phases of development for midrange
TLS
came to its conclusion in the same year as the
SEI
. This
was one of the last space programs, along with European
Space Agency initiatives, to advance laser scanning prior to
the third, more general era of midrange
TLS
(Flatscher
et al.
1999). The
SEI
was equally as important as the
ASV
and
ALV
projects and the NavLab at
CMU
, because it led to a series
of research programs and output that supported the system
architectures of hardware released in 1997–1998. This was
further driven by advancements encouraged in pumped and
Q-switched laser systems, as well as the use of retroreflec-
tive targeting systems. The
SEI
was announced on July 20,
1989, and was part of the 20th-anniversary celebrations for
the Apollo 11 moon landing in 1969 (Tchoryk
et al.
1991;
Matthies 1999). Funding was geared toward the exploration of
Mars (Tchoryk
et al.
1991; Zubrin, Baker and Gwynne 1991).
Developments from the
SEI
included an analysis of active
and passive sensors for space docking, planetary landing, and
rover navigation via three comprehensive evaluation reports
from
ERIM
(Tchoryk
et al.
1991). Strategy reports were also
provided by Martin Marietta Astronautics, and rover systems
were developed by contractors like
JPL
(Zubrin
et al.
1991;
Matthies 1999). Technologies that made their way into indus-
trial systems, such as those developed by Cyra Technologies,
included target solutions based on retroreflective surfaces and
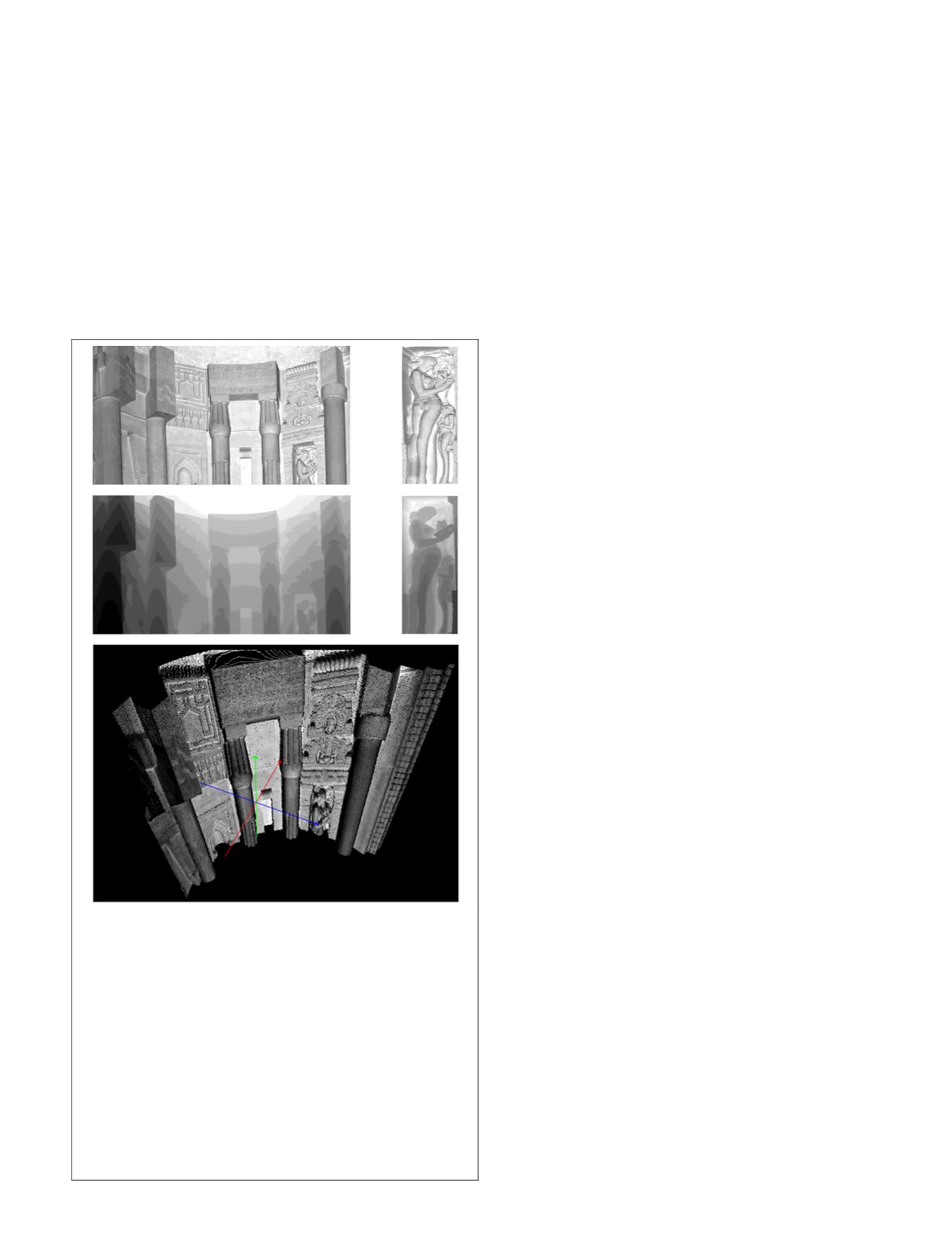
Figure 4. The scans of the Eastern sculpture niche of the
College of Fine Arts at Carnegie Mellon University (
CMU
).
The Franklin scanner that produced this data would
soon evolve into the SceneModeler range of scanners. It
was a tipping point moment for the Robotics Institute at
CMU
– built on experience gained from exposure to the
ERIM
sensor; projects like
ALV
; and collaborative efforts
with researchers coming out of the Technical University
of Munich (
TUM
) and the German manufacturing sector.
Graduates of
TUM
like Dirk Langer played a key role in
bringing Fröhlich, Mettenleiter, and Haertl to
CMU
– to
work on the Franklin and SceneModeler scanners. All
four men went on to become the driving force behind the
Imager 5003, the first midrange
TLS
system from Z+F. In
one respect, the story of phase shift-based midrange
TLS
is one of American and German collaboration and cross-
pollination.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2020
423


