410
July 2020
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
SECTOR
INSIGHT:
.
com
metry, usually higher model overlaps are recommended, and
images are captured in unusual orientations, e.g. often highly
oblique. Thus, this general suggestion for traditional photogram-
metry might not be realizable as easily. Therefore, simpler con-
figurations can be selected (Shahbazi et al., 2015)
In the case of direct georeferencing (DG), the external orien-
tation parameters of the images are directly observed by the
GNSS/INS without further modifications, i.e., one jumps di-
rectly to the dense matching step in the processing workflow.
The accuracy of DG depends on three factors: the performance
of the GNSS/INS components, the accuracy of platform cali-
bration (determining the lever arm offsets and the boresight
angles between the imaging and navigation sensors), and the
multi-sensor time synchronization quality (depending on the
flight speed, every microsecond of the synchronization bias
matters!). Usually, DG is avoided unless the processing time is
a priority, and one needs to skip the sparse-matching and bun-
dle adjustment steps. The downside to this is that the DG er-
rors directly propagate to the reconstruction errors. Finally, for
ISO, the observations of the GNSS/INS are added to the block
bundle adjustment as additional weighted observations. The
main benefit of ISO is that there is no need for GCPs since the
mapping datum gets defined by the GNSS/INS observations.
Imaging Sensors
When selecting the camera, one needs to pay close attention
to its controllable parameters as shutter speed, focal distance,
depth of focus, gain value, image size, image format, and rate
of acquisition. The worst enemies of accurate photogrammet-
ric products are auto-focus and zoom lenses.
A frequently asked question is whether one should calibrate the
internal parameters of the camera offline before starting the
photo mission or it is sufficient to perform an on-the-job self-cali-
bration. The answer to this question depends on the mission con-
figurations. If the imaging network is geometrically well config-
ured and there are enough check data available on the site, then
on-the-job self-calibration can be sufficient. Otherwise, throwing
internal camera parameters as additional unknowns to the block
bundle adjustment is not helpful – neither to camera calibration
nor to scene reconstruction. The choice of camera model and lens
(narrow-angle, wide-angle, and fisheye) adds another confusing
element we will leave for future discussion.
The sensor pixel size and the lens focal length, together with the
flight altitude, define the ground sampling distance (GSD), oth-
erwise known as spatial resolution. However, one should be care-
ful about reporting this theoretical GSD on the metadata of their
photogrammetric products. For instance, a spatial resolution of
1-cm does not guarantee that one can distinguish two objects
separated by a 1-cm distance in the produced point cloud. There
are many factors such as texture, exposure sufficiency, and the
dense-matching method which impact the density of the point
cloud and, thus, the real GSD. Besides, the GSD is a highly vari-
able value depending on the distance of the drone to the ground
and the view-angle towards the object. Ideally, the average hor-
izontal reconstruction accuracy must be in a range of 1 to 1.5
times the average GSD. As discussed, there can be no guaran-
tee of this assumption. Considering reconstruction accuracy, we
should clarify this often-misused term. When reconstructing the
3D model of an object, how close the model gets to the ground
“truth”, e.g. vertical and horizontal distances and angles between
corresponding points of the reconstructed model and the true
model, is important. The reconstruction accuracy should not be
confused with reconstruction completeness, which is a measure
of how many detail gaps exist in the reconstructed model.
In conclusion, drone photogrammetry does have the potential
of being used for surveying and high resolution mapping ap-
plications which demand high accuracy. However, many ele-
ments can negatively influence the correctness of this state-
ment. In addition, considerable attention should be paid to
the ways that service providers obtain, interpret, and repre-
sent the measures of precision, accuracy, and completeness
for their topographic products.
References
Abdullah, Q.A., 2019. Harnessing drones the photogrammet-
ric way.
Photogrammetric Engineering & Remote Sensing
85 (5):329-337. doi: 10.14358/PERS.85.5.329.
Shahbazi, M.; Sohn, G.; Théau, J.; Menard, P.; Shahbazi, M.;
Sohn, G.; Théau, J.; Menard, P., 2015. Development and
Evaluation of a UAV-Photogrammetry System for Precise
3D Environmental Modeling.
Sensors
15 (11) 27493–27524.
doi.org/10.3390/s151127493.
Author
Mozhdeh Shahbazi (PhD, PEng) joined the Department of Geo-
matics Engineering at the University of Calgary in 2016. Since
2018 she has also been an adjunct professor at York University
in the Earth and Space Science and Engineering graduate pro-
gram. In 2019 she took on the role of lead scientist at the Centre
de géomatique du Québec, a college-based center for technology
transfer. She is Secretary of Working Group I, Technical Com-
mission I of the ISPRS, a Director on the Board of the Canadian
Remote Sensing Society (CRSS), chair of Working Group III at
the CRSS; associate editor of Canadian Remote Sensing Jour-
nal; and associate editor of the Journal of Unmanned Vehicle
Systems. Since 2012 her research has focused on autonomous
mapping via vision-based unmanned aerial systems.
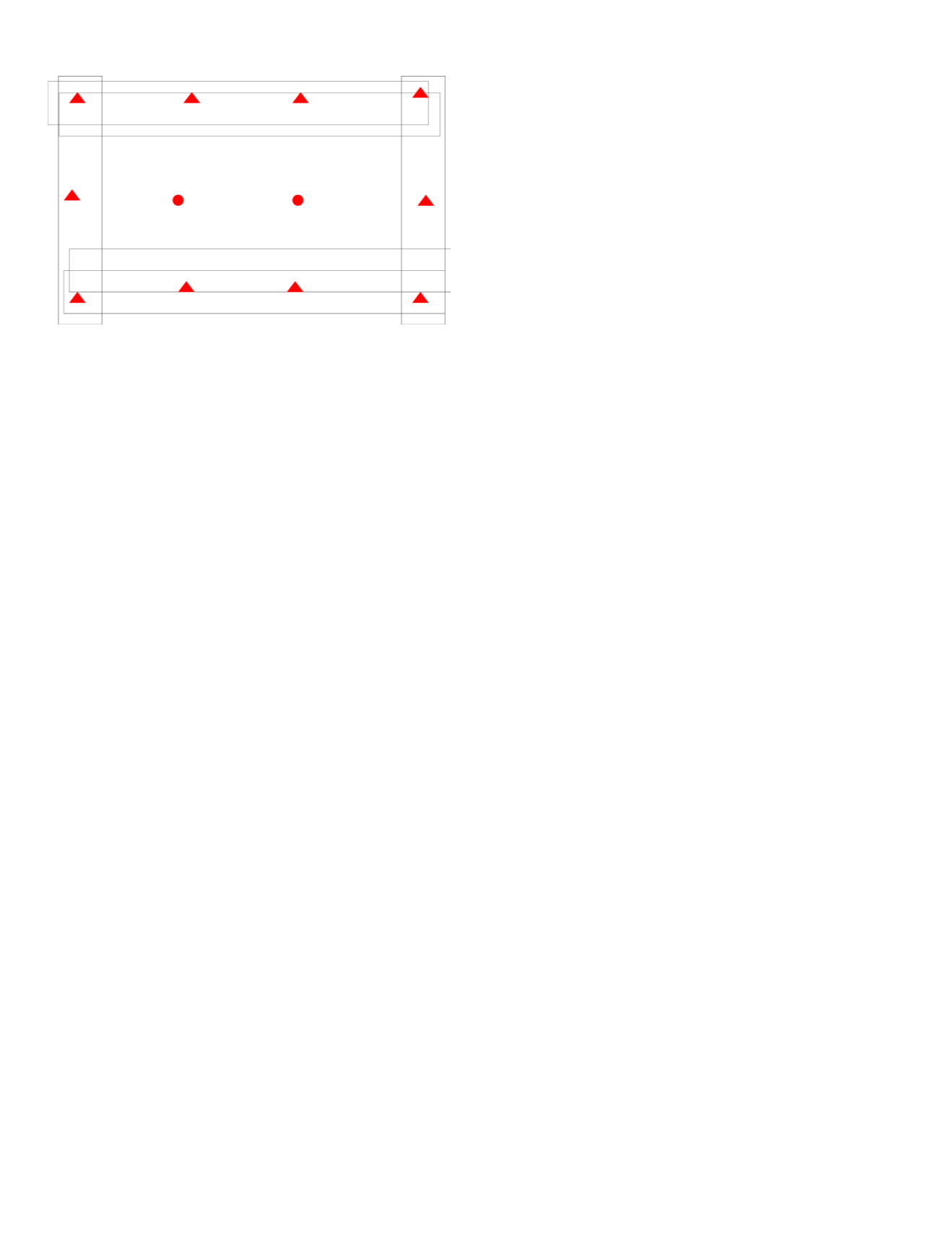
Figure 2. Suggested GCP configuration in airborne photogrammetry.


