a robot called the Stanford Cart. This took a similar form to
the
JPL
Laser Rangefinder by 1979 (Moravec 1983; Gage 1995).
When Moravec moved to
CMU
in 1981, his work became the
reference point for a smaller system called the
CMU
Rover
(Moravec 1983)
.
It also laid the groundwork for the
CMU
NavLab created in 1984 (Thorpe
et al.
1987). This university-
based laboratory was dedicated to developing semiautono-
mous and autonomous vehicles using computer vision.
PS
la-
ser scanners sold as survey tools—from Quantapoint (formerly
K
2
T) and Zoller and Fröhlich (Z+F)—were developed because
of NavLab-led initiatives, such as the Franklin scanner (Han-
cock
et al.
1998a; K
2
T 1998). There was also a connection to
European efforts, such as the Eureka
PROMETHEUS
Project,
through Dirk Langer. He helped develop the laser module for
the Franklin scanner, and brought Christoph Fröhlich to
CMU
to collaborate because of the laser module he had designed
in Germany. The
PROMETHEUS
Project was the largest research
and development project for self-driving cars, running from
1987 to 1995; Langer worked on ultrasonic sensors for it,
which was the groundwork for his coming to
CMU
. Both the
Franklin and
PROMETHEUS
projects marked a collaborative
effort between universities and businesses. Car manufacturer's
were amongst the companies interested in the technology.
The
JPL
Laser Rangefinder was soon followed by a
PS
system funded by
DARPA
(Gleichman
et al.
1988; Gage 1995;
Roland and Shiman 2002; Nilsson 2010). It was built by
ERIM
,
which had worked with the Bendix Corporation, an American
manufacturing and engineering company, to develop Lunar
Surface Experiments Packages for
NASA
as part of the Apollo
missions (Latham
et al.
1969; Hartman 1992).
ERIM
had also
worked extensively on multispectral scanning systems in
satellites (Polcyn, Lyzenga and Marinello 1977). This work
included tracking the exact distance to a point on the moon’s
surface to within a few inches using modulated lasers (Knock-
eart and Wilkinson 1975; Wolfe and Zissis 1978).
The
ERIM
sensor was built for the
ASV
in 1982 (Gleichman
et al.
1988; Gage 1995; Roland and Shiman 2002; Nilsson
2010). As seen in Figure 2, the
ASV
was a six-legged all-terrain
vehicle, which used the same alternating tripod movement
seen in insects (Waldron and McGhee 1986; Song and Wal-
dron 1989). The
ASV
came out of a collaboration between Bat-
telle Columbus Laboratories and Ohio State University, with
the
ERIM
sensor forming part of its navigation system (Zuk and
Dell’Eva 1983; Patterson
et al.
1984; Waldron and McGhee
1986; Gleichman
et al.
1988). It was designed to be deployed
in environments unsuitable for wheeled vehicles and con-
sidered too dangerous to go through on foot (Patterson
et al.
1984; Waldron and McGhee 1986).
The
ASV
project was part of a long-term strategy that
emerged from US military-funded research, which was di-
rected by an advisory board made up of artificial-intelligence
specialists from academia and industry (Stefik 1985; Roland
and Shiman 2002). It explored the use of autonomous vehicles
for direct combat as well as search and rescue (Patterson
et al.
1984). It also led to
ERIM
being chosen for the 1984–1988
ALV
program (Gleichman
et al.
1988). It was this project that dem-
onstrated that
PS
systems were becoming a viable means of 3D
data acquisition. The
ALV
program also formed part of a broader
Strategic Computing Initiative program in digital technologies,
which ran from 1983 to 1993 (Roland and Shiman 2002).
Autonomous Land Vehicle
Work began on the
ALV
project in September 1984, using the
experimental
ERIM
sensor seen in the guidance system for
the six-legged
ASV
(Gleichman
et al.
1988). It can be seen in
Figure 3, which shows an illustration of the
ALV
from
Popular
Science
(Schefter 1985). The sensor was retrofitted to correct
known deficiencies, then mounted to a vehicle and sent out to
map the
DARPA
-Martin Marietta
ALV
test site in Denver, Colo.
It was the first of four data-capture missions that provided
information to the contractors:
CMU
, Martin Marietta Aero-
space, and Sandia National Laboratories. Each played a key
role in future midrange
TLS
developments by refining both the
hardware and the software (Zuk
et al.
1985; Beyer, Jacobus
and Pont 1987; Everett 1995).
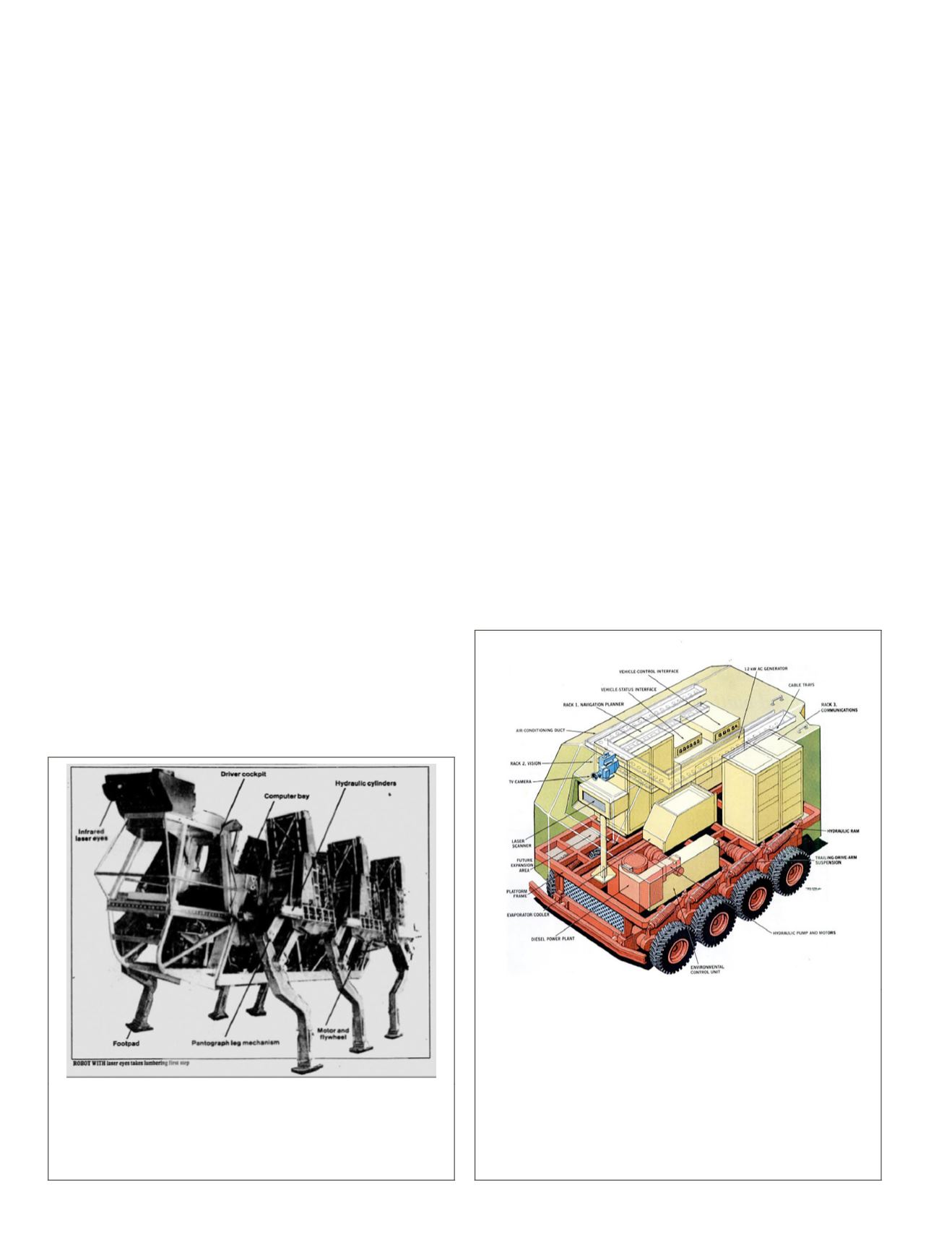
Figure 3. The Autonomous Land Vehicle project introduced
several new participants to laser scanning because of the
Environmental Research Institute of Michigan sensor. It also
brought Takeo Kanade, Pradeep Khosla, and Chuck Thorpe
together—through two separate projects managed by Clint
Kelly III. The three would later go on to form K
2
T together at
Carnegie Mellon University and release the Franklin scanner
as a commercial product. Christoph Fröhlich would also go on
to create the Zoller and Fröhlich range of phase shift scanners
after working on the Franklin. (Illustration by Ray Pioch.
Reproduced by permission from John Schefter, “Look, Ma! No
Driver,”
Popular Science
227: PP. © 1985 by Ray Pioch.)
Figure 2. The Adaptive Suspension Vehicle was developed
via a collaboration between Battelle Columbus Laboratories
and Ohio State University. It used an insect-inspired leg
system to navigate terrain. Its vision system also included a
laser scanner from the Environmental Research Institute of
Michigan (Hoggett 2010).
422
July 2020
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


