PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2020
399
tum-derived positions (Figure 2). When we use an inaccurately
surveyed network to control another process such as aerial
triangulation, in reality we are fitting the aerial triangulation
solution to an observed datum. The degree of approximation
depends on the surveying technique or technology employed in
that survey. The Real-Time Kinematic (RTK) field surveying
technique can produce positions that are accurate to 2cm hor-
izontally and perhaps 3cm vertically. The differential leveling
technique used to determine height can produce elevations that
are accurate to the sub-centimeter. The lesson to learn here is
that our surveying techniques, no matter how accurate, do not
represent the true datum—but they can get us close to it.
Surveying and Survey Datum
When we task surveyors to survey the ground control network
in reference to a certain datum, they can only determine the
positions of the control network to that datum as close as the
surveying techniques allow. In other words, the coordinates
that are being used to control the mapping process repre-
sent an observed or survey datum that represents a pseudo
datum but not the original intended or true datum (Figure 2).
For example, if we are trying to determine point coordinates
in NAD83(2011), the surveyed coordinates used in aerial
triangulation or lidar calibration represent a datum that is
close to NAD83(2011) but not exactly NAD83(2011) due to the
inaccuracy in our surveying techniques. That inaccurate sur-
vey represents a survey datum. Besides the inaccuracy in the
surveying techniques, another layer of errors (i.e. distortion) is
added to the surveyed coordinates when we convert geograph-
ic positions (in latitude and longitude) to projected coordinates
or grid coordinates, such as state plane coordinates systems.
Mapping To The Mapping Datum
Any mapping process we conduct today inherits two model-
ing errors that influence product accuracy. The first model-
ing error is caused by the inaccuracy of the internal geo-
metric determination during the aerial triangulation, or the
boresight calibration in the case of lidar processing. The sec-
ond modeling error is introduced by the auxiliary systems,
such as GPS and IMU, and has inherent errors caused by
the survey datum. Therefore, when we use mapping products
to extract location information, we are determining these
locations in reference to the survey datum and not the origi-
nal intended datum. The point coordinates for NAD83(2011)
are determined not according to the survey datum of the
ground control network but through a new reality of map-
ping datum. The mapping datum inherits the errors of the
survey datum, which were caused by the inaccuracy of our
surveying techniques and the errors caused by our mapping
processes and techniques (Figure 2).
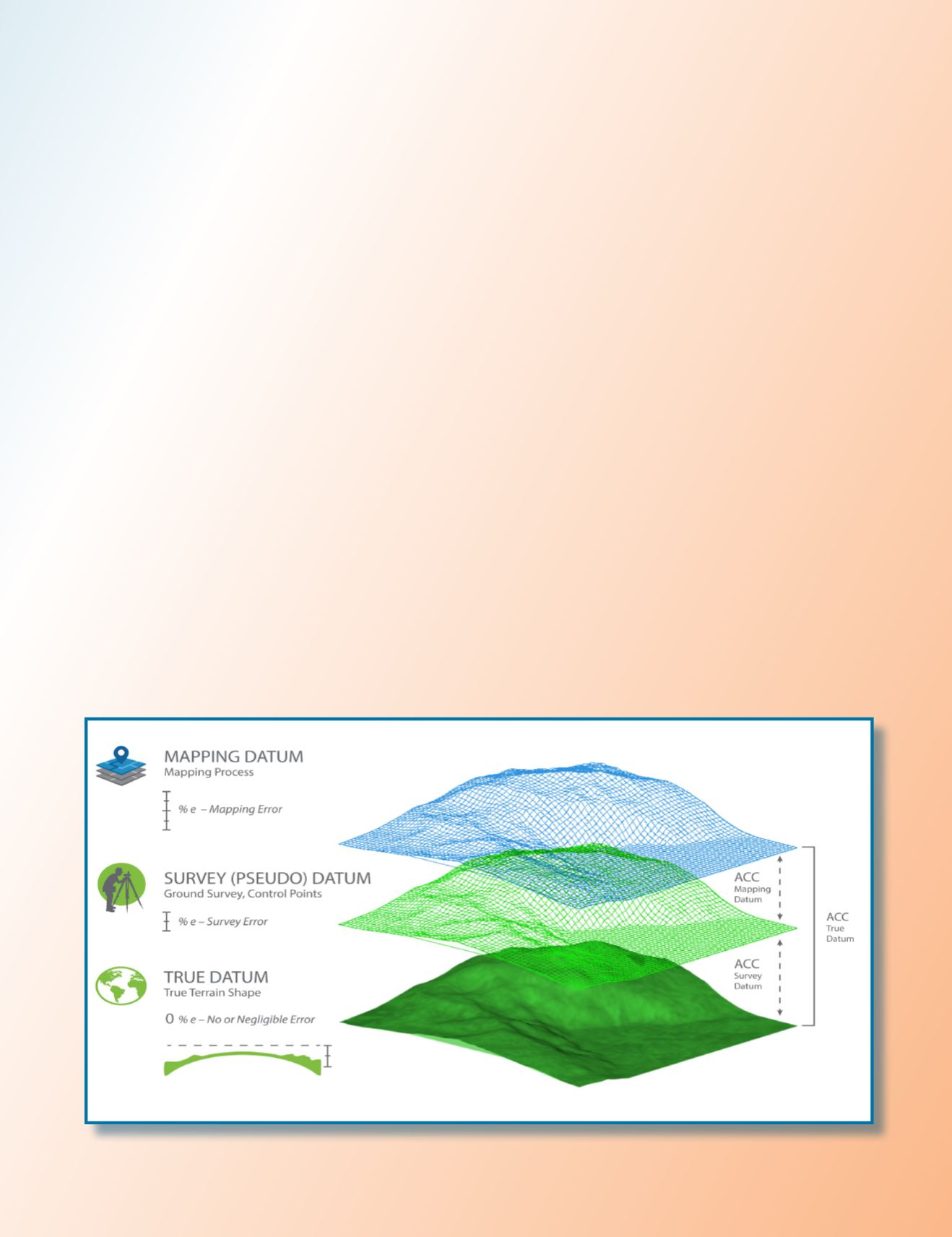
Drilling to the True Datum
To reference the accuracy of determining a mapped object
location within a mapping product to the original intended
datum like NAD83(2011), we need to examine the layers of
errors that were introduced during the ground surveying and
mapping processes (Figure 2).
Figure 2: Datums and error propagation in geospatial data.


