experimentally demonstrated its advantages in exploiting the
spatial-contextual information contained in the difference
image because of its well-established mathematical founda-
tion. These models assume that the feature value at each
pixel relies on the values of only its neighboring pixels, and
can simultaneously ensure the consistency of the class labels
with local extent and spatial smoothness through interaction
between neighboring pixels (Benedek and Szirányi, 2009).
Based on the aforementioned remarks, we propose a novel
methodology for unsupervised change-detection methodology
relying on the combination of multiple features. The general
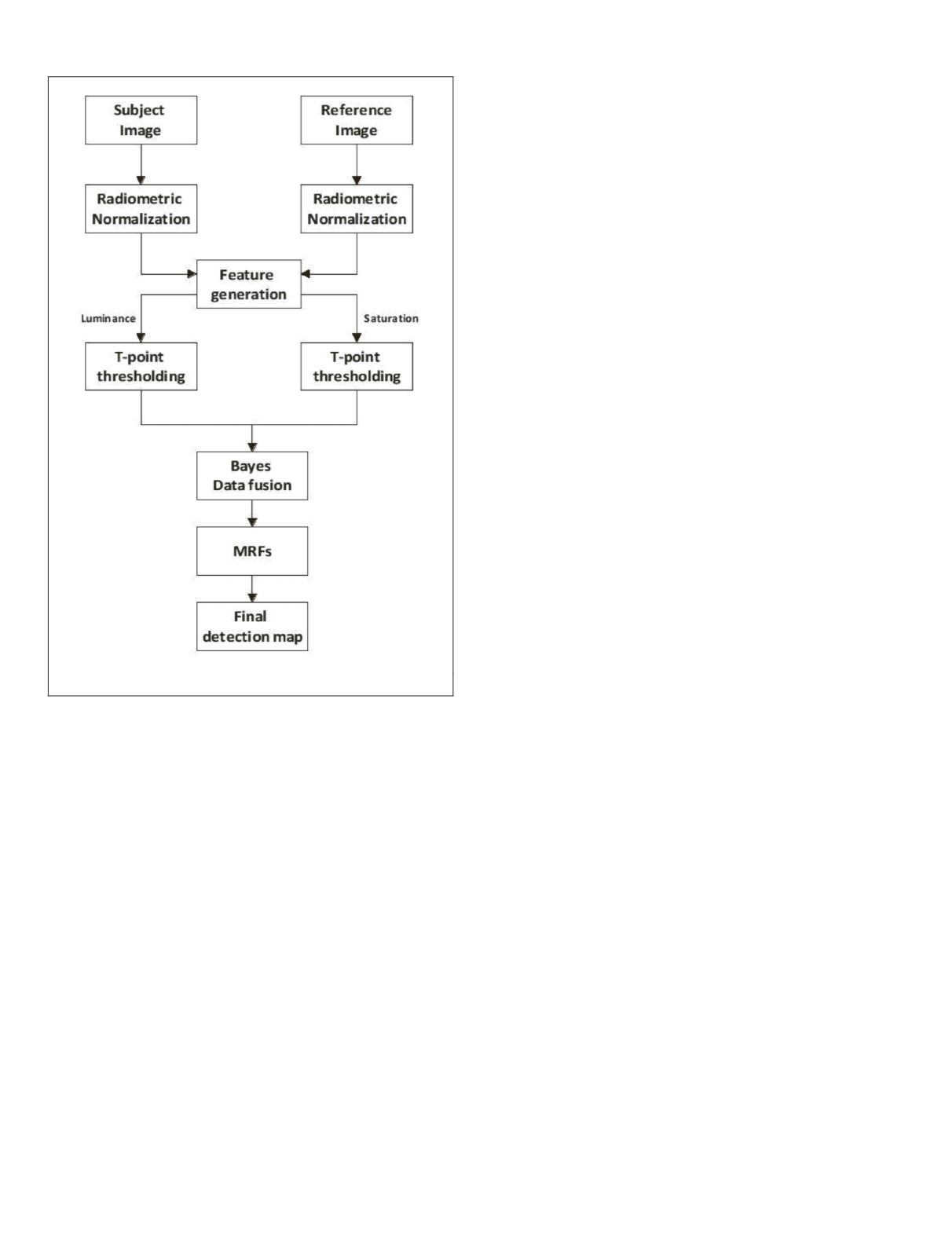
scheme of proposed method consists of five steps:
1. automatic radiometric normalization for preprocessing;
2. two relatively independent features, i.e., luminance
and saturation, are chosen to perform the specific urban
change-detection work;
3. the T-point algorithm is conducted to get reasonable
thresholding values for each feature image;
4. Naïve Bayes is then adopted to combine two feature
classification results based on the probability density
function for each class; and
5. as the last step, MRFs framework is responsible for in-
tegrating spatial-contextual information and generating
the final map.
This paper is organized into four parts. In the second sec-
tion, we mainly address the detailed description of the
steps involved in our proposed procedure. In the section on
experimental result, the outcomes of exploring single feature
are presented to show their relationship first; both qualitative
and quantitative comparison between our method and other
three previous unsupervised approaches are presented after; the
final section discusses our work, and a conclusion is presented.
Proposed Method
The overall schema for the proposed procedure is given in Fig-
ure 1. Each component is described in detail in the following.
Radiometric Normalization
Reflectance properties of pixels are affected by various il-
lumination or atmospheric effects, requiring radiometric
normalization (
RN
) before pixel-by-pixel comparison. The
method of Pseudo-Invariant Feature (
PIF
) (Sohl, 1999; Im and
Jensen, 2005) has been commonly used for
RN
in the previous
research, which builds a regression relationship of two scenes
based on the “no-change” pixels from manual sampling. How-
ever, from our point of view, the manual selection of Pseudo-
Invariant pixels goes against the principle of unsupervised
techniques. In this paper, a two-fold regression procedure is
introduced to automatically accomplish relative radiometric
normalization: first we apply Image Regression (
IR
) (Yang and
Lo, 2000) to estimate the linear regression relationship on the
pixels of whole image, and get the initial difference image;
then we implement T-point thresholding to separate the un-
changed set from the differencing image obtained by the first
regression, and finally we derive the final linear regression
equation based on the unchanged pixels after thresholding.
HSL Color Space and Feature Generation
HSL
(or
HSI
,
HSV
) color representation, an alternate to others
(e.g.,
RGB
color model), is considered more intuitive to human
perception than others, and has been applied for many previ-
ous image processing tasks (Zhang and Wang, 2000; Hu
et
al.
, 2005; Dhandra
et al.
, 2006). More importantly, using such
color representation can effectively reduce inter-band correla-
tion (Gillespie
et al.
, 1986; Lei, 1999) through separating three
relatively independent parts: luminance, hue, and saturation.
Luminance (“L”) is the brightness descriptor, which is
utilized to represent the total amount of lightness. Hue (H)
and saturation (S) jointly describe the color of an image: “H”
represents the dominant wavelength in the spectral distri-
bution; “S” represents a measure of the purity of the color
(Dhandra
et al.
, 2006). Hue value is often very unstable when
the saturation is low (Cheng
et al.
, 2001; Dhandra
et al.
,
2006), probably leading to numerous errors with any type
of thresholding strategy because of the inconsistent shape of
the histogram. Accordingly, only saturation is selected in our
method to represent color information.
There are two other similar methods of generating color
features for options, (hue-saturation-intensity (
HSI
) and hue-
saturation-value (
HSV
) color models.
HSI
is considered to
have the highest correlation, because its saturation is defined
without being standardized; the difference between
HSL
and
HSV
is that a decrease in
HSL
in saturation results in a loss of
color strength while maintaining the same visual brightness;
whereas in
HSV
a reduction in saturation causes the visual
brightness to increase. From our point of view,
HSL
is more
suitable than
HSV
for the proposed modal because there is less
correlation between the components, since a good indepen-
dence level among features is the basic assumption for the
subsequent Bayes fusion.
Image Differencing and Thresholding
Direct pixel-by pixel differencing result is implemented in
our procedure instead of traditional absolute differencing
(Bruzzone and Prieto, 2000; Le Hégarat-Mascle and Seltz,
2004), in case of the issue of asymmetrical change occurring
Figure 1. Schematic representation of the proposed procedure.
638
August 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


