To achieve high accurate image matching based on lo-
cal invariant features, various methods have been proposed
which used a coarse-to-fine matching scheme by integrating
FBM
and
ABM
methods (Han
et al.
, 2012; Sedaghat
et al.
, 2012;
Ye and Shan, 2014; Yu
et al.
, 2012). For example, Han
et al
.,
(2012) proposed an automatic registration of high-resolution
images using local properties of features. In their method,
images were first coarsely aligned using the
SIFT
algorithm
and affine transformation model; then, a spatial distance
and orientation difference between features of the reference
and sensed images are additionally used to extract a large
number of evenly distributed control points. Generally, these
two-stage integrated approaches require a preregistration and
resampling step that increases the computational complexity
in the matching process.
Some limit works have been done on direct improving the
accuracy of the local invariant features in images (Cordes
et
al.
, 2009; Forstner
et al.
, 2009; Mainali
et al.,
2013). For exam-
ple, Cordes
et al
. (2009) proposed
HALF-SIFT
(High-Accurate
Localized Features-
SIFT
) to increase the localization accuracy
of the
SIFT
detector. To avoid the systematic error caused by
the improper subpel interpolation in
SIFT
algorithm, they
developed two interpolation techniques for the subpel estima-
tion of the
SIFT
detector based on a Gaussian and a Difference
of Gaussians function model (Cordes
et al.
, 2009). All meth-
ods of this type separately deal with the feature positional
accuracy in each image during extraction step. Therefore, the
features cannot be exactly matched, because of the variations
of features between different images due to significant local
distortion and occlusion.
The main objective of this article is to develop an accurate
local affine invariant feature matching method for photogram-
metry and remote sensing applications. To achieve a high
accuratcy and reliable affine invariant feature-based image
matching, an advanced least square matching method called
Oriented Least Square Matching (
OLSM
) is proposed. First, ini-
tial corresponding local features on the images are extracted
based on an improved integrated approach of
MSER
and Harris-
Affine algorithms. Then the positional accuracy of each initial
matched is significantly improved using proposed
OLSM
meth-
od. The key idea of
OLSM
method is to use oriented matching
window instead of a constant rectangular matching window.
The proposed
OLSM
method is compared with standard
LSM
in
the synthetic, and real close range and satellite images.
Methodology of the Proposed Method
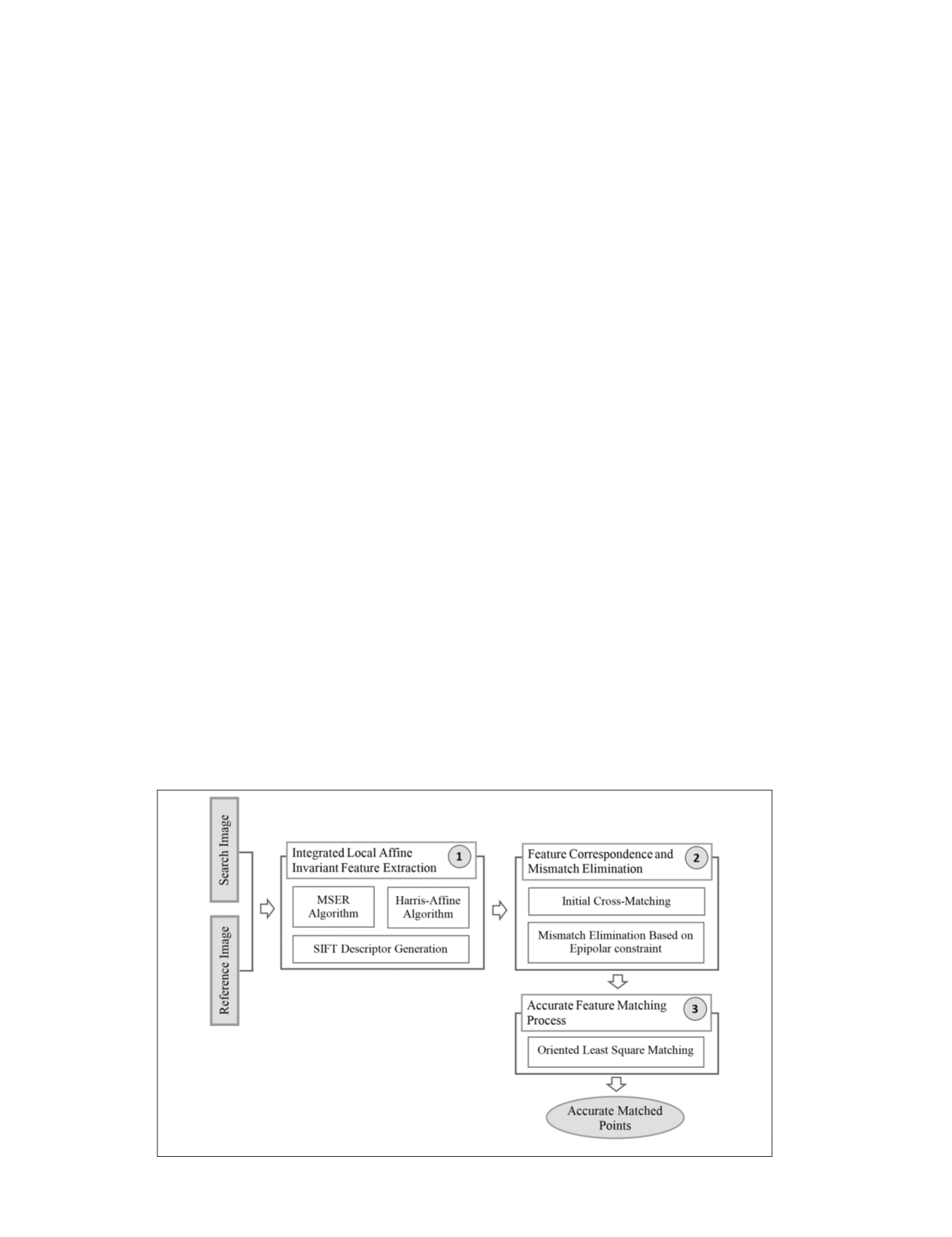
In this section, an effective and robust automatic approach
for accurate affine invariant image matching is presented. The
proposed method can be divided into three main steps, as
illustrated in Figure 1.
In the first step, a set of affine invariant local features is
extracted and described in both reference and search images.
This process is effectively performed with integration of
MSER
and Harris-Affine algorithm and for each extracted feature,
the
SIFT
descriptor is generated based on local image gradi-
ents. In the second step, a cross matching process followed by
a consistency check based on epipolar constraint is performed
using Euclidean distance between feature descriptors. Finally,
an accurate matching process is performed to improve the ac-
curacy of the extracted correspondence points from pervious
step. This process is automatically performed by an improved
LSM
matching method called Oriented Least Square Matching,
OLSM
method. In the proposed
OLSM
method, for each initial
matched region pair, the shape of the matching window is
approximated based on its elliptical region pair. The details of
the proposed method are presented in the following sections.
Affine Invariant Feature Extraction and Initial Matching
Various methods for local invariant image feature extraction
have been already proposed. One of the most effective and
prominent methods for robust affine invariant feature ex-
traction is
MSER
(Matas
et al
., 2004) algorithm.
MSER
regions
denote a set of distinguished irregular regions, which are de-
fined by an extremal property of its intensity function in the
region and on its outer boundary. Despite
MSER
’s robustness
to affine transformation, this approach tends to generate a low
number of detections because it requires extensive, well-de-
fined homogeneous regions (Barandiaran
et al.
, 2013).
In order to overcome this limitation, another affine feature
detector is used as complementary one. For this purpose, the
Harris-Affine (Mikolajczyk and Schmid, 2004) detector is ap-
plied. This detector provides several times more regions than
the other common detectors such as
MSER
and
IBR
with high
repeatability and localization accuracy (Mikolajczyk,
et al.
,
2005). Liu
et al
., (2008) proposed an affine invariant remote
sensing image registration based on Harris-Affine algorithm.
Therefore, an integrated affine invariant feature extraction
algorithm based on
MSER
and Harris-Affine algorithm is used
in the proposed matching algorithm. Each of these image
Figure 1. The main stages of the proposed method.
734
September 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


