estimation, non-maximum suppression, and hysteresis
thresholding) and can detect weak edges without introduc-
ing spurious edges (Li
et al
., 2010). For edges detected using
the
EDSION
, a local re-weight strategy (Arbelaez
et al
., 2009)
is used to detect the local maximum near the endpoints of
the edges until the edge intersects with a neighborhood edge.
Finally, the closed edges are obtained to form segments.
However, our extensive experiments with urban images
suggest that the exclusive use of the above method leads to
significant over-segmentation problems due to the complex
textures in urban images. Therefore, a region growing al-
gorithm (Felzenszwalb and Huttenlocher, 2004) is used to
reduce over-segmentation by merging and growing regions
with similar properties.
Notably, image segmentation is not the emphasis of this
research, and therefore the well-known segmentation algo-
rithms were used. It might be necessary to interactively edit
the automatically obtained segmentation results to ensure
reliability and effectiveness. Figure 2 presents an example of
the segmentation results.
Occlusion Filtering
In stereo vision, the occlusion problem refers to the visibility
of some parts of the scene by one camera but not the other
camera as a consequence of scene and camera geometries.
Urban areas contain many skyscrapers and tall buildings that
present opportunities for occlusion (e.g.,
object self-occlusion and occlusion between
multiple objects) (Xing
et al
., 2009). To
reduce the ambiguities caused by occlusion
problems, we propose an occlusion filter
in the image matching framework based on
previous image segmentation results.
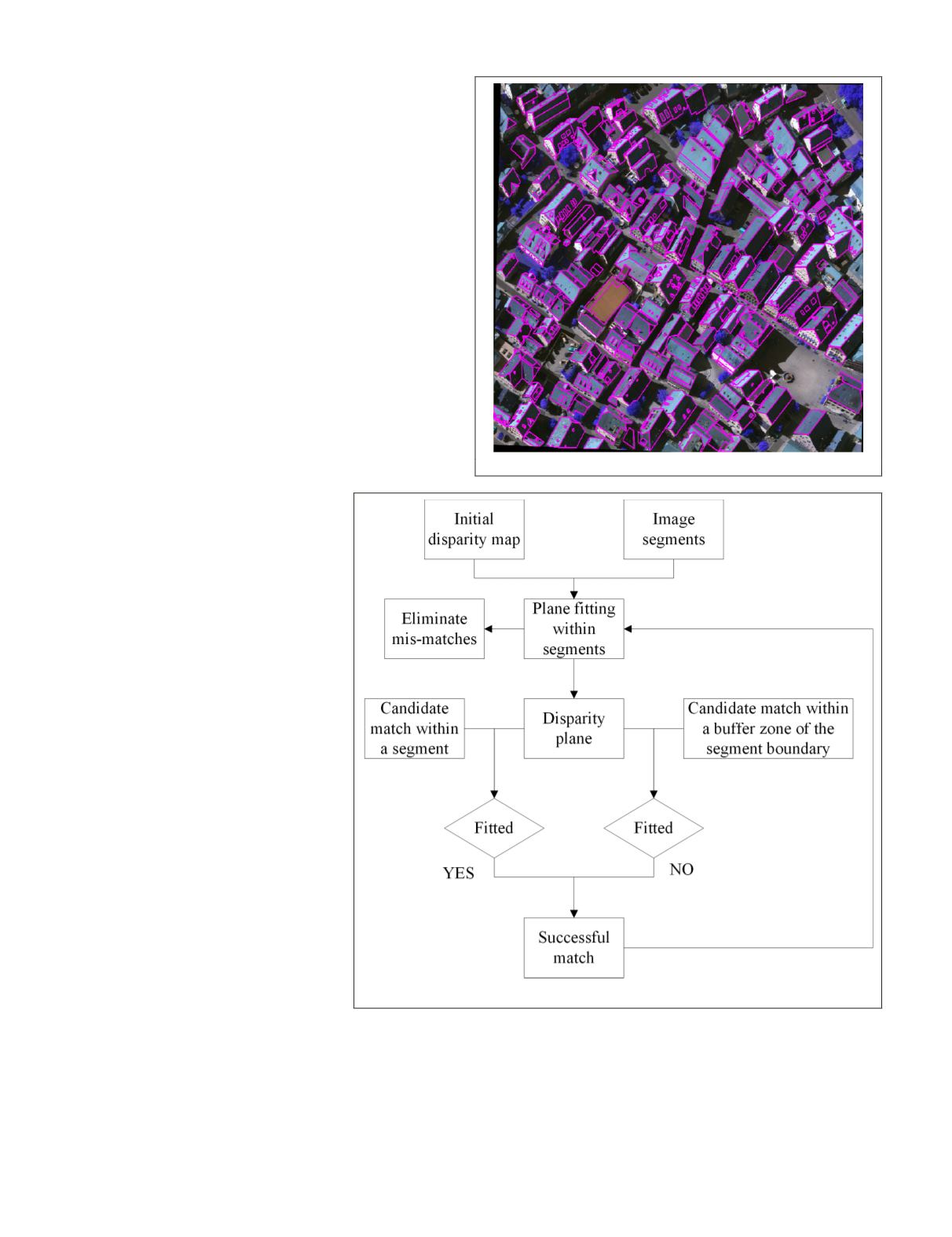
Occlusion filtering assumes that dispari-
ties will change smoothly within the same
plane (either a building roof or facade), but
will change suddenly when the image point
changes from a facade location to a roof
and vice versa. Therefore, two scenarios are
considered specifically: (1) candidate match
within a segment, and (2) candidate match
outside a segment but within a buffer zone
of the segment boundary. Figure 3 shows a
flowchart of the occlusion filtering method.
An initial disparity map is generated based
on feature matching results obtained during
the previous step. The image segmentation
results and
RANSAC
algorithm (Fischler and
Bolles, 1981) are used to fit the disparities
D
and the image coordinates (
u,v
) within
each segment, using a robust plane model
(e.g., for the building roof) or a quadratic
surface model
D
=
S
(
u,v
) (e.g., for building
facades). From the established plane model,
each pixel (
u
p
,v
p
) within the segment will
be able to have an estimated disparity
D
S
P
=
S
(
u
p
,v
p
) based on interpolation. For the
first scenario of candidate match within the
segment, if the disparity from the candidate
match
D
C
P
=
S
(
u'
p
,v'
p
) is within a threshold
range of the interpolated disparity
D
S
P
,
the match is considered successful. Disparities beyond the
threshold range suggest a mismatch possibly due to occlusion
problems that should be excluded. For the second scenario of
candidate match outside a segment but within a buffer zone
of the segment boundary, the disparity of the candidate match
D
C
P
should be outside the threshold range, and a failure to
meet this criterion may also indicate a mismatch. The newly
matched point (
u
p
,v
p
,
D
C
P
) will be collocated, and used to re-fit
the plane dynamically by
RANSAC
, and inserted into the trian-
gulations dynamically to ensure that the plane will gradually
approach the real situation. Notably, occlusion filtering sets
a loose constraint on earlier stages of matching propagation
when the smaller number of matched points reduces the accu-
racies of the disparity planes. These constraints tighten as the
number of matched points increases during the later stages of
the matching propagation.
Figure 2. Example of an image segmentation result.
Figure 3. Flowchart of occlusion filtering.
138
March 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


