point, the number of contour points falling within each sector
is counted to build the histogram of shape context informa-
tion under polar coordinates. The
SSSF
descriptor is built by
sampling the histogram in the polar coordinate system to the
Cartesian coordinate system. The horizontal and vertical coor-
dinates are expressed in a radial (N = 5) and angular direction
(M = 12), respectively. This descriptor reflects the distribution
of other points around the feature point. In other words, it re-
flects the characteristic of the terrain structure in the template
window. Therefore, the similarity between
SSSF
descriptors is
used as a metric to match multisource images.
Similarity Measure Based on the SSSF
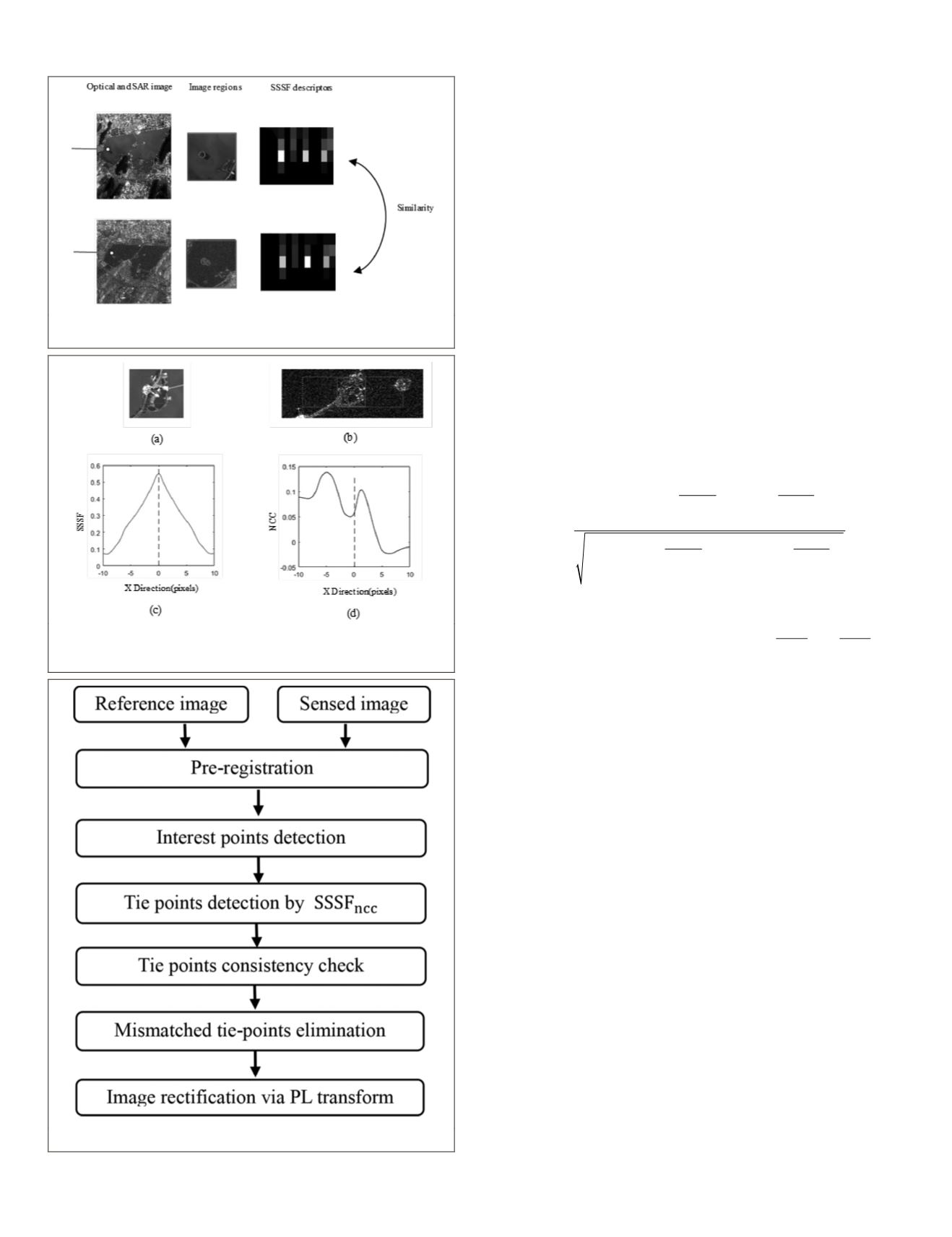
As mentioned above, the
SSSF
descriptor can detect the scene
shape structures of a certain region in images, making it reli-
able for significant nonlinear grayscale differences. Figure 4
shows that the
SSSF
descriptor is computed from the tie point
of the optical and
SAR
images in the same region. Although
significant grayscale differences exist between the two images,
the descriptors are quite similar. On the basis of the similar
shape feature, this descriptor can be applied to multisource
remote sensing image registration. Therefore, this study uses
the
NCC
of the
SSSF
descriptor (abbreviated as
SSSF
ncc
) as the
similarity measure for multisource image registration. The
SSSF
ncc
is calculated as follows:
SSSF
ncc
=
−
−
−
=
∑
( ( )
( ))( ( )
( ))
( ( )
( ))
( (
h k h k h k h k
h k h k
h k
p
p
q
q
k
n
p
p
q
1
2
)
( ))
,
−
=
=
∑
∑
h k
q
k
n
k
n
2
1
1
(2)
where
p
and
q
are the point features of the two images,
respectively;
h
p
(
k
) and
h
q
(
k
) are the
SSSF
descriptors of a tem-
plate region centered at
p
and
q
, respectively;
h
p
(
k
) and
h
q
(
k
)
indicate the means of the
SSSF
descriptors.
SSSF
is compared with
NCC
through the similarity curve
to reveal its advantages in terms of matching multisource
images. The test selects a set of optical and
SAR
images with
significant nonlinear grayscale differences. First, a template
e feature points with a certain size
is extended. Then, the
NCC
and
SSSF
earch region (20×20 pixels) of the
SAR
image. The similarity curve of
SSSF
and
NCC
is shown in Fig-
ure 5. Comparison shows that
SSSF
obtains the correct match
point, whereas
NCC
fails to obtain tie points. This example
indicates that
SSSF
is preliminarily more robust to significant
intensity differences compared with
NCC
.
Multisource Image Registration based on SSSF
ncc
This section introduces a reliable multispectral image reg-
istration method based on
SSSF
ncc
. Figure 6 shows the main
matching procedure of the proposed method. The detailed
steps are as follows:
1. The obvious rotation differences between two images are
first removed via coarse rectification. Then, the possible
resolution differences can be eliminated by resampling
the two images into the same ground sample distance
(GSD). In addition, the
SAR
images used in this experiment
have not been subject to pretreatment, such as radiomet-
ric calibration and topographic correction. However, for
SAR
images with different azimuth and range resolutions,
multi-view processing is required to eliminate the defor-
mation of the ground caused by
SAR
side-view imaging.
2. The blocked Harris operator is used to obtain uniformly
distributed feature points from the reference image. Then,
Figure 4.
SSSF
descriptor computed from the tie point of the
optical and
SAR
images in the same region.
Figure 5. Similarity curve of
SSSF
and
NCC
. (a) Optical
image. (b)
SAR
image. (c)
SSSF
ncc
similarity measure. (d)
NCC
similarity measure.
Figure 6. Main matching procedure of the proposed method.
728
October 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


