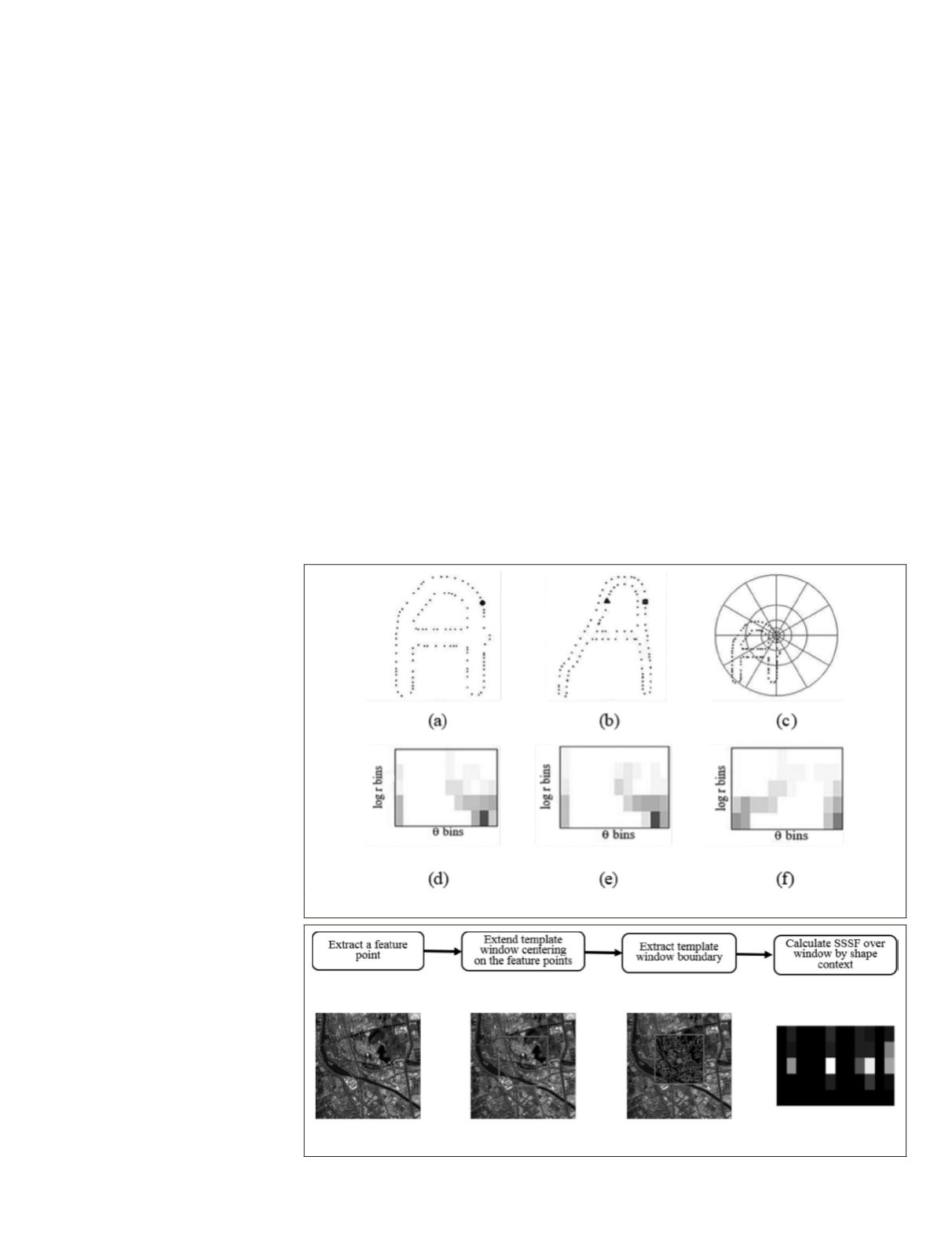
2. The shape context is calculated. Any point
p
i
is taken as
a reference point. N concentric circles are established at
a logarithmic distance interval in a local area, where
p
i
is
the center. This region is equally divided in the circumfer-
ential direction M to form a target template, as shown in
Figure 2c. The vector relative position of point
p
i
to other
points is reduced to the number of point distributions in
each sector on the template. The statistical distribution
histogram
h
i
(
k
) of these points, called the shape context of
point
p
i
, is calculated as:
h
i
(
k
) = #{
q
≠
p
i
:(
q
–
p
i
)
∈
bin(
k
)}
(1)
where
k
= {1, 2, …,
K
},
K
=
M
×
N
. In this paper, the con-
centric circle is set to five layers, and the circle is divided
into 12 partitions (N = 5, M = 12).
The use of logarithmic distance segmentation allows the
shape context descriptor to enhance local features and be
more sensitive to adjacent sample points rather than to away
from the point. As shown in Figures 2d and 2e, the shape
context at different points of the contour varies, but the cor-
responding points of similar contours tend to have similar
shape contexts.
For the entire point set
P
, the n points
p
1
,
p
2
, …,
p
n
are
used as reference points, and the shape histograms composed
of the remaining n − 1 points are sequentially calculated.
Finally, n-shaped histograms are obtained and stored in a
matrix of size n×(n–1). Thus, for any target, a matrix of size
n×(n–1) can be used to repre-
sent its shape information, and
a matrix of size n×(n–1) is the
shape context of the set of points
P
, therefore describing the char-
acteristics of the entire contour
shape. Finally, the shape context
of the given shape is obtained
through Steps 1 and 2.
In the template window ex-
tended by feature points, a con-
centric circle with each point as
the center point is drawn. And
the concentric circle is set to
five layers, the circle is divided
into 12 partitions, so there are
5×12=60 grids. Then the distri-
bution of other points in these
60 grids should be counted. This
distribution is presented by sam-
pling the angles and distances
of other points relative to the
feature points in a polar coor-
dinate system. Finally, an array
of length 60 is needed to record
the distribution of other points
around the feature points. This
completes the sampling of the
contours in the template scene.
SSSF Descriptor
This thesis mainly aims to define
a robust descriptor that can
function despite the significant
nonlinear grayscale differences
between multisource remote
sensing images. In this section,
the shape context algorithm
is used to propose a novel
descriptor named
SSSF
. The
SSSF
descriptor characterizes the
terrain structure similarity of images using shape context.
The shape context feature is reliable for grayscale differences
and intensity changes and also reflects the local shape feature
of images. Therefore, the shape context feature is utilized
to build the
SSSF
descriptor. Figure 3 shows the process of
extracting the
SSSF
descriptor, and the details of each step are
as follows:
1. The first step extracts a feature point from the feature
point set.
2. The second step extends a certain size template window
that centers on the feature point and extracts template
window boundaries using the canny operator. This step is
for calculating the
SSSF
descriptor.
3. The third step calculates the histogram of shape context
information over the template window. Here, only the
shape context at the center point of the template window
(i.e., feature point) is calculated to reduce computational
time. Each histogram for the template window is normal-
ized by the L2 norm to adjust against illumination changes
well. This process calculates the shape context for the
template window and obtains the scene shape feature
information.
4. The final step builds the
SSSF
descriptor by reshaping the
histogram of the template window. This descriptor will be
used for multisource image registration.
The
SSSF
descriptor inherits the characteristics of the shape
context algorithm. In the target region centered on the feature
Figure 2. Shape context calculation and similarity.
Figure 3. The main process of extracting the
SSSF
descriptor.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
October 2019
727


