Figure 8 shows the optical-
SAR
2 contours detected by a
different canny threshold. The image contours detected by the
canny threshold of 0.1 are too dense and plentiful to reduce
the impact of the increase/decrease and deformation of ter-
rain. By contrast, contours are not enough to use the canny
threshold of 0.3 to extract the terrain shape features, making it
difficult to extract a sufficient number of tie points. Therefore,
the experiments achieve the highest registration accuracies
when the parameters are set to 15×15 pixel template windows
with a canny threshold of 0.2. The remaining experiments are
implemented on the basis of these parameters (include the
results shown in Figure 9, Figure 10, Figure 11, and Table 2).
Table 2 shows that the proposed
SSSF
ncc
has been success-
fully applied to match all data. These tests achieve different
registration accuracies due to terrain and resolution differ-
ences. The registration accuracies of the medium-resolution
and map sets are higher than the high-resolution set. The
registration results have such significant differences that the
medium-resolution set with low resolution contains small
local distortions. The map set data are obtained from simpli-
fied real terrain (classify terrains into one class) containing
small local distortions. High-resolution sets obtain the lowest
registration accuracy due to the increase/decrease and clear
deformation of terrain between two images. However, the
RM-
SEs
of optical-
SAR
1 and optical-
SAR
2 are 0.97 and 1.11 pixels,
respectively. These values are acceptable accuracies for the
registration of high-resolution images.
The number of tie points and the
CMR
have some differ-
ences among the five tests. The optical-
SAR
2 and 4, which
contain urban areas, have more terrain features compared
with optical-
SAR
1 and 3, which contain a large water area.
Therefore, more tie points can be detected in the optical-
SAR
2 and 4 images. As for the map set, detecting too many tie
points is difficult due to the lack of terrain. The CMRs of all
five groups of data are very high. Compared with optical-
SAR
1 and 3, the
CMRs
of optical-
SAR
2 and 4 are higher due to the
similarity and amount of terrain between the reference and
sensed remote sensing images. Therefore, the optical-
SAR
4
achieves the best registration accuracy. In summary, these
registration results show that the
SSSF
ncc
similarity measure is
robust for significant nonlinear grayscale differences among
multisource remote sensing images.
Comparison of SSSF with Other Methods
In this study, the
SSSF
ncc
similarity measur
tie points. The proposed
SSSF
ncc
is compared with the
NCC
,
HOPC
ncc
, and
CSLTP
to illustrate its accuracy in terms of match-
ing multisource remote sensing images.
The histogram of the oriented phase congruency (
HOPC
) (Ye
et al.
2017) based on shape features is successfully used to
match the multisource remote sensing images. This descrip-
tor first divides the image into several blocks, with each
block comprising several “cell” units. The phase consistency
histograms in all cells are counted and linked together to
form the final feature description vector. The basic idea of
phase consistency is that the image features always appear at
the maximum phase overlap of the Fourier harmonic compo-
nents. Then, the correlation coefficient between the feature
vectors (
HOPC
ncc
) is used to match the correspondence points.
However, this descriptor is limited by the structural features
of the image and can be time consuming.
The main ideal of
CSLTP
based on self-similarity is a
rotation invariance description strategy on local correla-
tion surface. The
SIFT
algorithm is applied for local feature
detection and the
CSLTP
descriptor is constructed for each
extracted feature points. Then, a bilateral matching strategy
combined with an outlier removal procedure in the geometric
transformation model are applied for feature registration and
mismatch elimination. This method has successfully matched
various multisource satellite images and results show that it
is inherently rotation invariant and robust to complex inten-
sity differences. This study compares the
HOPC
ncc
and
CSLTP
to
illustrate the reliability of the proposed method.
Five comparison experiments were set to verify the ac-
curacy of
SSSF
ncc
by detecting tie points between multisource
images. First, the same 800 Harris feature points were de-
tected in the reference image. The tie points were extracted
in a search region (20×20 pixels) of the sensed image via a
template matching method using the
SSSF
ncc
,
NCC
,
HOPC
ncc
as
measures, while the
CSLTP
uses a bilateral matching strategy to
match tie points. The most appropriate parameters were set to
three similarity measures to analyze the registration accuracy
of these three similar measures. For example, the
HOPC
ncc
was
set with the parameters of
β
= 8 orientation bins, 3×3 cell
blocks of 4×4 pixels cells, and a
α
= 1/2 block width overlap.
A global consistency check method was then used to remove
the mismatched tie points.
Table 2 lists the matching performance of all the five tests,
including the total matches, matched points, CMRs, match-
ing times, and
RMSEs
. The times, CMRs, and
RMSEs
are applied
to assess the registration accuracy of the proposed method.
Figure 13 shows the times,
RMSEs
, and CMRs of these three
similar measures.
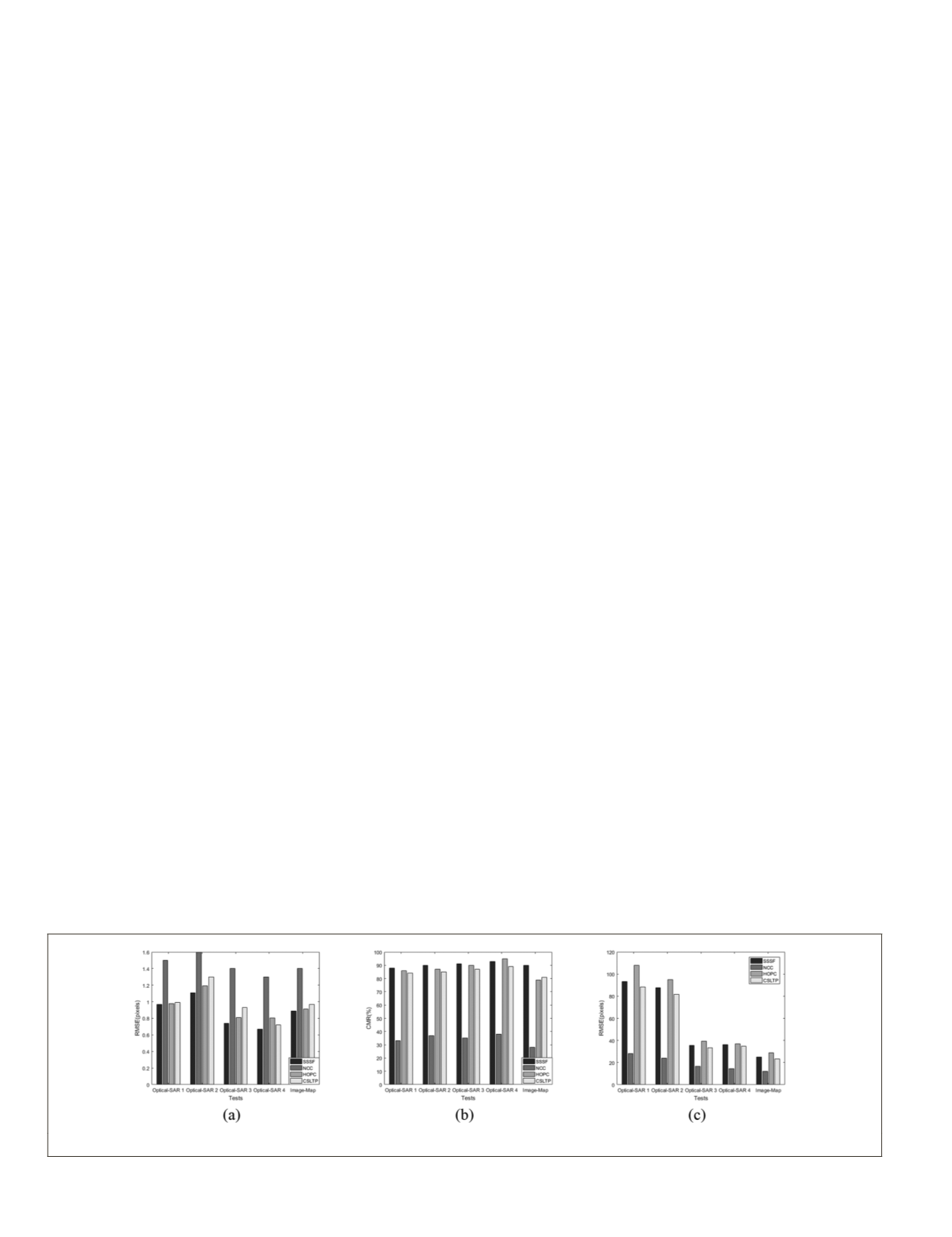
As shown in Figure 13 and Table 2, the
RMSEs
and CMRs of
SSSF
ncc
show better results compared with the other meth-
e analysis is as follows: The
NCC
is
ty patterns rather than the complex
erences across multisource images.
s good registration outcome. How-
ever, the
CMRs
and
RMSEs
of
HOPC
ncc
are slightly lower than
the proposed method, because the
HOPC
ncc
is defined by the
single amplitude and orientation of phase congruency (Ye
et
al.
2017), whereas the
SSSF
ncc
is based on the relative position
of the vector from the center of the area to the other points.
The accuracy of
CSLTP
is lower than
SSSF
ncc
and
HOPC
ncc
may be
because it is inherently rotation invariant rather than robust
to the local deformation caused by high buildings and river
Figure 13. (a)
RMSEs
, (b) CMRs, and (c) Times of three similarity measures.
734
October 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


