imaging time. Therefore, the variation rule for the across- and
along-track residual errors along
x
can reflect the interior er-
rors, whereas those along
y
show the dynamic exterior errors.
The residuals in Table 4are caused by interior errors. Based
on A in the table, the errors in the interior orientation param-
eters obtained at the laboratory reached approximately 42 pix-
els, and errors were observed in translation, scale, rotation,
etc., as shown in Figure 4a. The interior orientation param-
eters in D of Table 4 were calibrated through the conventional
method using the 1:2 000 scale
DOM
and
DEM
of Tianjin. This
was used in both 05-15 2011-Henan and 08-09 2012-Tianjin
to achieve accuracies better than 0.7 pixels. These results
showed that the geometric parameters of the camera onboard
Yaogan-4 were stable with little change between 15 May 2011
and 09 August 2012. Note that both the 1:2 000-scale
DOM
and
DEM
of Tianjin were considered as control data for the
conventional calibration in D, whereas only the 1:2 000-scale
DEM
was used in C for cross-calibration. The comparable ac-
curacies of C and D demonstrate that the accuracy of cross-
calibration with an accurate
DEM
can be very close to that of
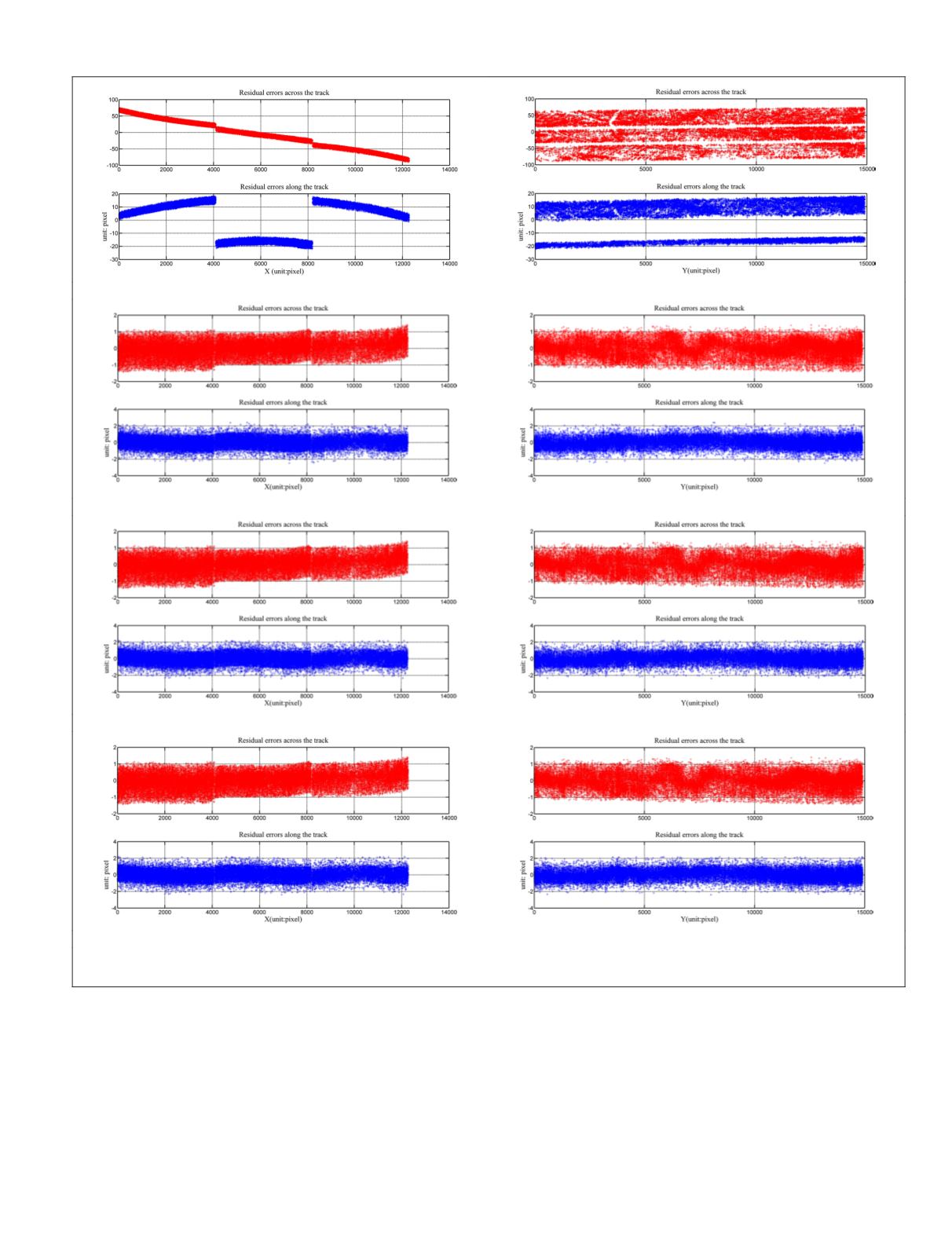
(a)
(b)
(c)
(d)
Figure 5. Trends in the residual errors (08-09 2012-08-Tianjin): Interior orientation parameters (a) measured at the laboratory; (b) of
the cross-calibration with 90m-
SRTM
;(c) of the cross-calibration with the 1:2 000 scale
DEM
, and (d) from conventional calibration.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
August 2018
491


