conventional calibration. A comparison of B and C indicates
that cross-calibration using the 1:2 000 scale
DEM
can achieve
a better accuracy than that by using 90 m-
SRTM
; however,
the difference was approximately only 0.1 pixel. This is very
close to the deviation of approximately 0.14 pixels deduced
from Equation 11, thus demonstrating the correctness of the
analysis of the effect of the height error. Thus, the height er-
ror of the 90 m-
SRTM
could be neglected in the experiment.
Therefore, the interior orientation parameters can be precisely
calibrated, even with a coarse
DEM
such as a 90 m-
SRTM
.
Results for Dataset B
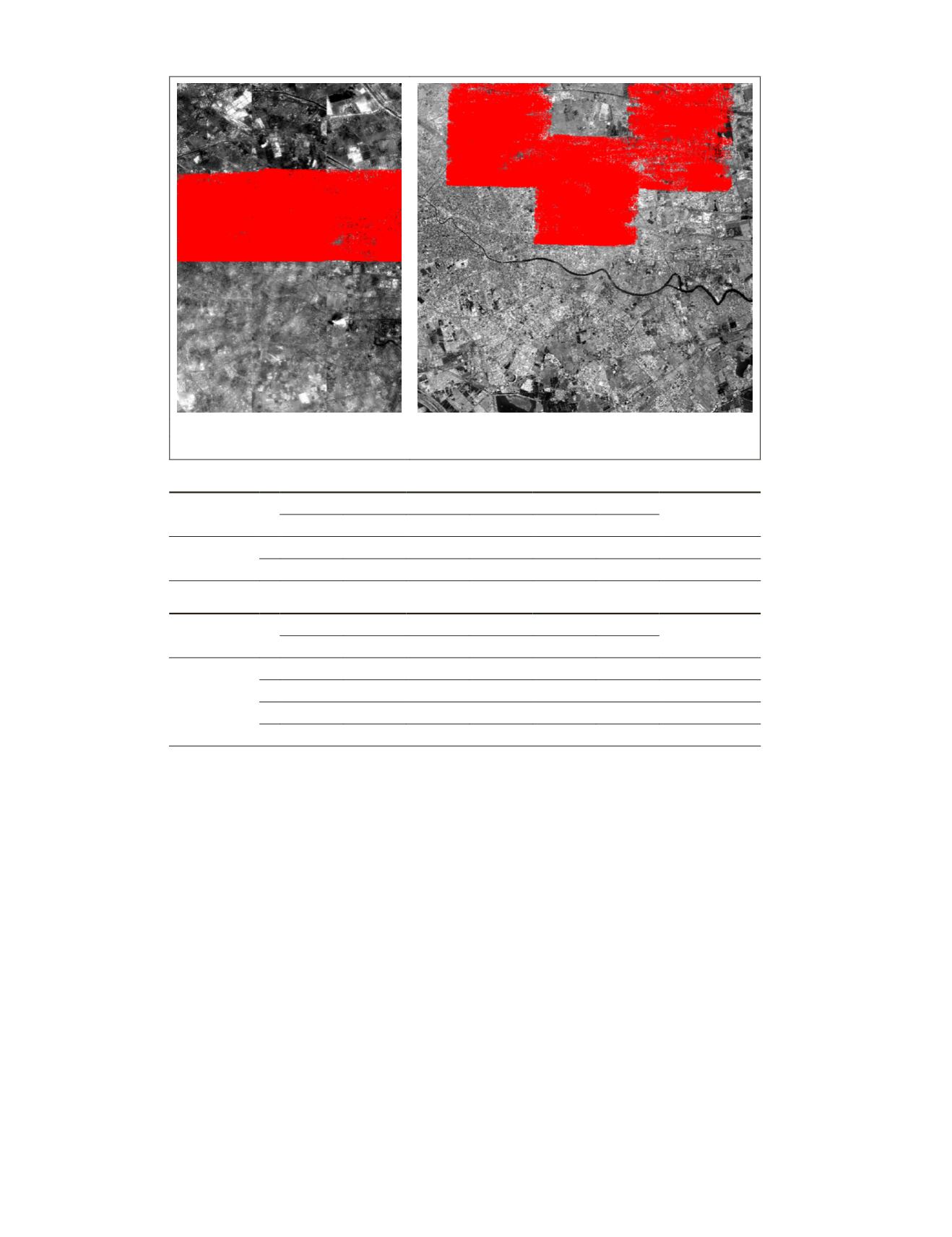
As shown in Figure 6, 14,863 well-distributed conjugate
points were obtained by matching 02C_Tianjin with ZY3_Tian-
jin for cross-calibration. Moreover, 51,496 conjugate points
were extracted in the adjacent
CCD
arrays of 02C_Tianjin.
We calibrated 02C_Tianjin with all conjugate points, and
the results are presented in Table 5. Parameter A denotes
the intersection accuracy after solving for the offset matrix
of 02C_Tianjin relative to ZY3_Tianjin, and B represents the
intersection accuracy after cross-calibration with 90 m-
SRTM
.
As the laboratory-obtained interior orientation parameters
of ZY02C that were used to build the geometric model con-
tained large errors, only a poor intersection accuracy of 2,300
pixels could be achieved for A. Regardless, the intersection
accuracy was improved to less than 0.3 pixels after compensa-
tion for the interior errors of ZY02C through cross-calibration.
We obtained 11,553 high-accuracy control points by
matching 02C_Tianjin with the 1:2 000 scale
DOM
of Tianjin
for further validating the cross-calibration. The results are
presented in Table 6. A in the Table denotes the positioning
accuracy after the exterior errors were eliminated with the in-
terior orientation parameters obtained at the laboratory in the
geometric model, B denotes the direct positioning accuracy
after cross-calibration, C denotes the positioning accuracy
after the exterior errors were eliminated with the cross-cal-
ibration parameters, and D represents the positioning accu-
racy after 02C_Tianjin was calibrated with the conventional
calibration method using high-accuracy
GCPs
.
As noted earlier, interior orientation parameters with large
errors were used to build the original geometric model for
02C_Tianjin in A (tABLE 6). The accuracy only reached 2,491
pixels after the exterior errors were eliminated. As the direct
positioning accuracy of ZY3_Tianjin was approximately
15 m, the accuracy of 02C_Tianjin without
GCPs
after cross-
calibration could not surpass 15 m. In addition, B in tABLE
6 indicates that the accuracy without
GCPs
for 02C_Tianjin
reached 7.61 pixels (approximately 15 m). This demonstrates
that the direct positioning accuracy after cross-calibration de-
pended on the reference positioning accuracy. In C, which did
(a)
(b)
Figure 6. Distribution of conjugate points: (a) 02C_Tianjin; (b) ZY3_Tianjin
Table 5. Accuracy of geometric cross-calibration (02C_Tianjin).
Calibration
scene
Along-track (pixel)
Across-track (pixel)
Plane accuracy
(pixel)
Max
Min RMS Max
Min RMS
02C_Tianjin
A 3781.56
789.69
2320.95 411.94 113.19
270.19
2336.63
B 0.95
0.00
0.25
0.44
0.00
0.17
0.30
Table 6. Positioning accuracy validation.
Calibration
scene
Along-track (pixel)
Across-track (pixel)
Plane accuracy
(pixel)
Max
Min RMS Max
Min RMS
02C_Tianjin
A 3336.83 1714.04 2491.10 53.25 53.25 35.05
2491.35
B 3.25
0.00
0.96
9.18
5.38
7.55
7.61
C 2.10
0.00
0.54
2.14
0.00
0.50
0.74
D 2.20
0.00
0.52
1.55
0.00
0.42
0.67
492
August 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


