Results and Discussion
Results of the Building Facade Scene (ETH Dataset)
Segmentation results of
VGS
and
SVGS
using the lidar point
cloud from the building facade scene are illustrated in Figures
9a and 9b, with segments rendered using different gray val-
ues. Here, the voxel resolution used in
VGS
and
SVGS
is set to
0.1 m, while the seed resolution of supervoxels used in
SVGS
is 0.2 m. The thresholds
δ
for graph segmentation are option-
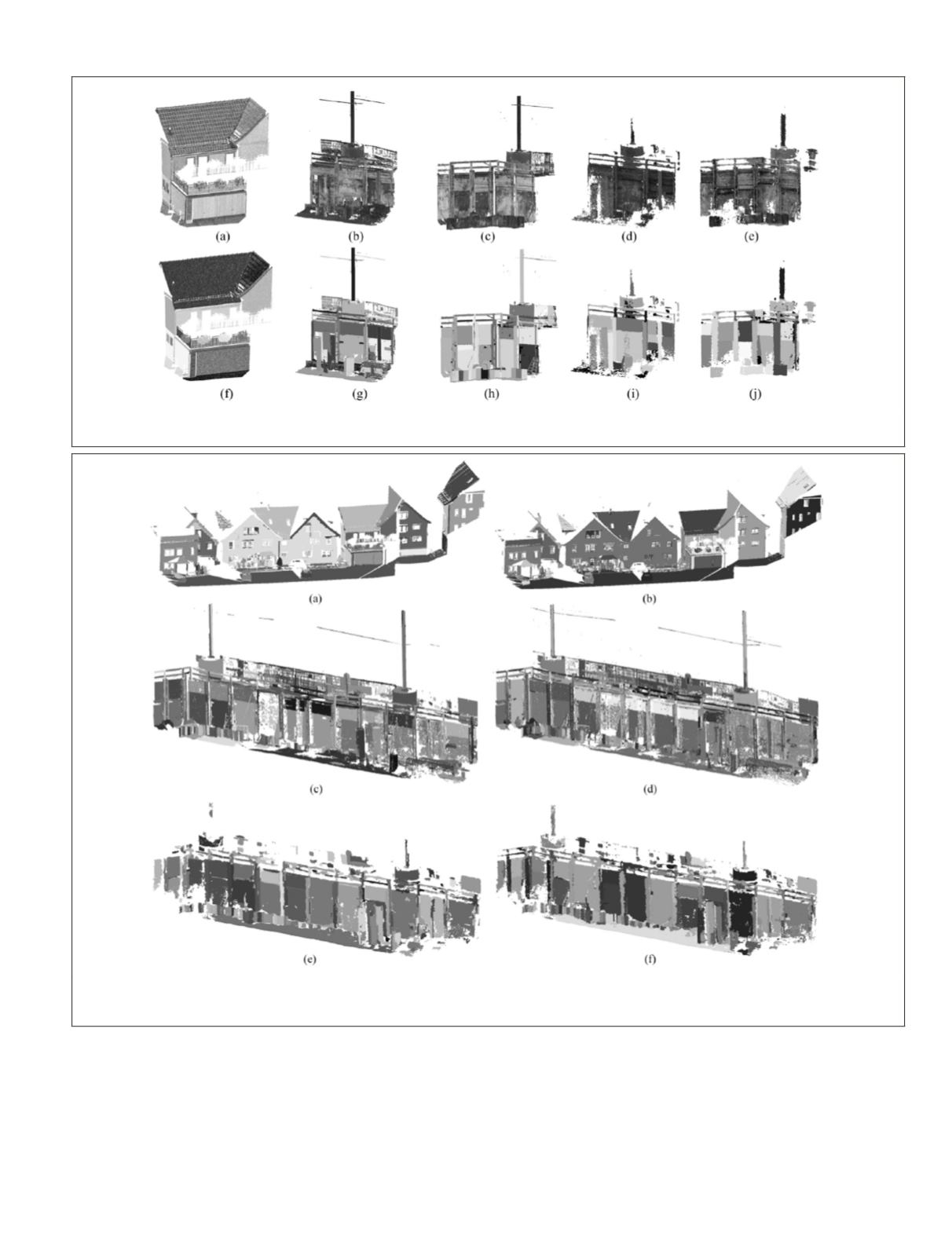
ally set to 0.65 and 0.3, respectively. As seen from the figure,
ground, and wall surfaces, decks, fences, and window sills
are segmented from the building facade as individual objects.
Figure 8. Original point clouds of (a) Sample 1, (b) and (c) Sample 2, and (d) and (e) Sample 3. (f) to (j), Corresponding
manually segmented ground truth (shown with different gray values).
Figure 9. Segmentation of the building facade using (a) VGS and (b) SVGS methods. Segmentation results of the
construction site using (c) VGS and (d) SVGS methods with LiDAR dataset, and using (e) VGS and (f) SVGS methods with
photogrammetric dataset.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
June 2018
385


