scene classification (Chong
et al.
, 2009; Putthividhy
et al.
,
2010; Huang
et al.
, 2015).
However, the
BOVW
and topic models rely on the estab-
lishment of empirically designed features to depict the local
patches of the images as visual words. In order to overcome
this limitation, an increasing amount of research has focused
on unsupervised machine learning methods to autonomously
extract adaptive and suitable features from unlabeled input
data. For example, Coates
et al.
(2010) built a single-layer
UCNN
for unsupervised feature learning. They used different
unsupervised learning algorithms to generate local convolu-
tional features (i.e., function bases), and found that
k
-means
clustering, which is an extremely simple learning algorithm,
achieved the best performance. Blum
et al.
(2012) applied the
network proposed in Coates
et al.
(2010) to object recognition
from natural images with depth information. Dosovitskiy
et
al.
(2014) developed a multi-layer
UCNN
to learn feature rep-
resentations from unlabeled images, and the learned features
performed well in natural image classification. Recently,
in order to classify remotely sensed scenes, Li
et al.
(2016)
trained a multi-layer
UCNN
using
k
-means clustering to au-
tonomously mine complex structure features from high-reso-
lution images, and used support vector machine (
SVM
) for the
final scene classification. In this study, the features extracted
by the
UCNN
achieved a better scene classification accuracy
than
BOVW
and sparse coding.
To the best of our knowledge, little research has been
so performed concerning tea garden detection from remote
sensing data. However, this is necessary since tea cultivation
plays an important part in Chinese agriculture, but the current
tea garden monitoring relies on field investigation, which is
time-consuming and labor-intensive. In this context, in the
proposed scene-based framework, high-resolution satellite
images are employed to detect tea gardens, since these im-
ages can provide abundant spatial and textural information.
Considering that a tea garden is a semantic scene composed
of a variety of interrelated objects in a high-resolution image,
we propose to apply scene-based semantic learning methods
for tea garden detection, including the following experimental
configurations: (1)
BOVW
is used to represent the scenes with
spectral and Gabor textural features. An
SVM
classifier is then
employed to classify the representation into tea gardens and
non-tea gardens; (2)
sLDA
is used to extract the topic features
from the
BOVW
representation of the scenes and predict the cat-
egory label of each scene; and 3) A multi-layer
UCNN
is trained
to generate discriminative features from the original spectral
images, and the derived features are also classified by
SVM
.
The rest of this paper is organized as follows. The next sec-
tion introduces the tea garden detection framework, followed
by a description of the datasets and the experimental setup.
The next section presents the detection results and discus-
sion with the different methods and features. The last section
concludes the paper.
Methodology
In this section, we introduce the scene classification meth-
ods employed in this study (i.e.,
BOVW
,
sLDA
, and the
UCNN
).
Subsequently, the proposed scene-based tea garden detection
framework is described in detail.
Topic Scene Classification Models
BOVW
is the basis of the topic models, and thus it is pre-
sented before introducing the
sLDA
model. The
BOVW
model
was derived from a text analysis method which represents
a document by the word frequencies, ignoring their order.
The idea was then applied to images by utilizing the visual
words formed by vector quantizing the visual features. The
BOVW
representation is constructed in two stages, as shown in
Figure 2, i.e., visual word learning and feature encoding. Dur-
ing the visual word learning, the remotely sensed images are
divided into patches, and the spectral or textural information
of these patches is extracted to generate feature vectors which
can describe the patches. We then quantify the spectral and
textural descriptors using the k-means clustering algorithm.
The cluster centers, which are known as “visual words”,
form a dictionary. In the feature encoding, an unrepresented
scene is split into several patches. Each patch is assigned to
the label of the closest cluster center after extracting features
of the patch. In this way, an image can be represented by a fre-
quency histogram of the labeled patches. The histogram can
be regarded as a feature vector for the subsequent classifica-
tion, whose size is equal to the size of the dictionary.
The
BOVW
model represents a scene as a text document by
the frequencies of the visual words. The
LDA
model (Blei
et
al.
, 2003), which is a generative probabilistic model from the
statistical text literature, characterizes the scene as random
mixtures over latent topics, where each topic in turn is de-
scribed by a distribution over the visual words in the dic-
tionary. The process of
LDA
to generate a scene
d
can then be
described as follows (as shown in Figure 3):
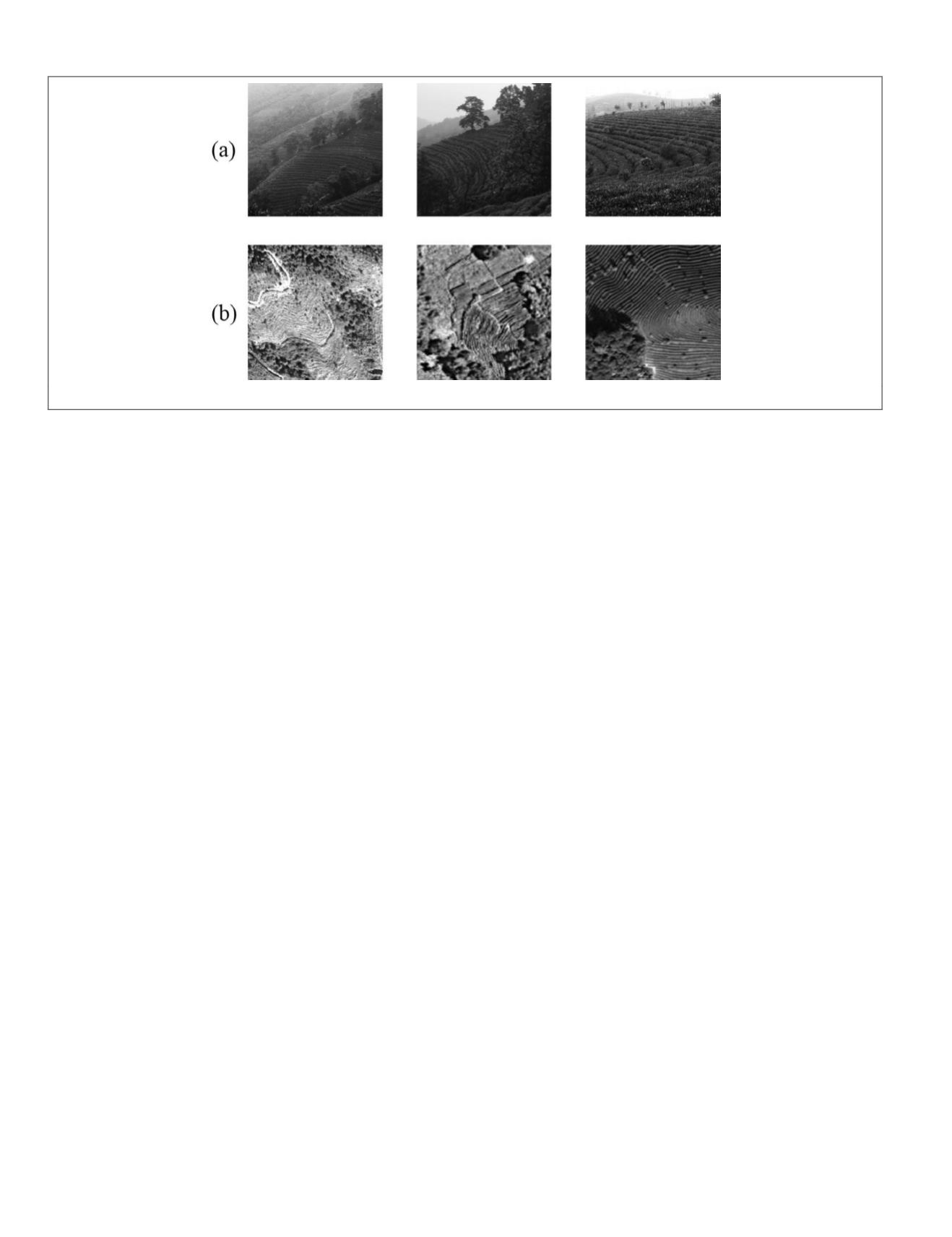
Figure 1. Examples of tea gardens: (a) Digital camera photographs, and (b) Google Earth images.
724
November 2018
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


