process as formulated by Equation 4 is carried out by using
sample points from the two-point clouds. The sample rate
depends on the overlapping rate between them.
E
s
t
n
i
i
i
n
=
( )
- ⋅
=
∑
S V T( ) ,
2
1
(4)
where S( ) and T( ) are overlapping subsets from two-point clouds.
The
4PCS
strategy is an iterative solution and validation
process. Based on the
RANSAC
platform,
4PCS
randomly selects
a four-point-base from a candidate set and then to set up
correspondences in an inquiry set iteratively based on the
geometric constraints and validation criteria. The geometric
constraints in the original
4PCS
are modified to satisfy our
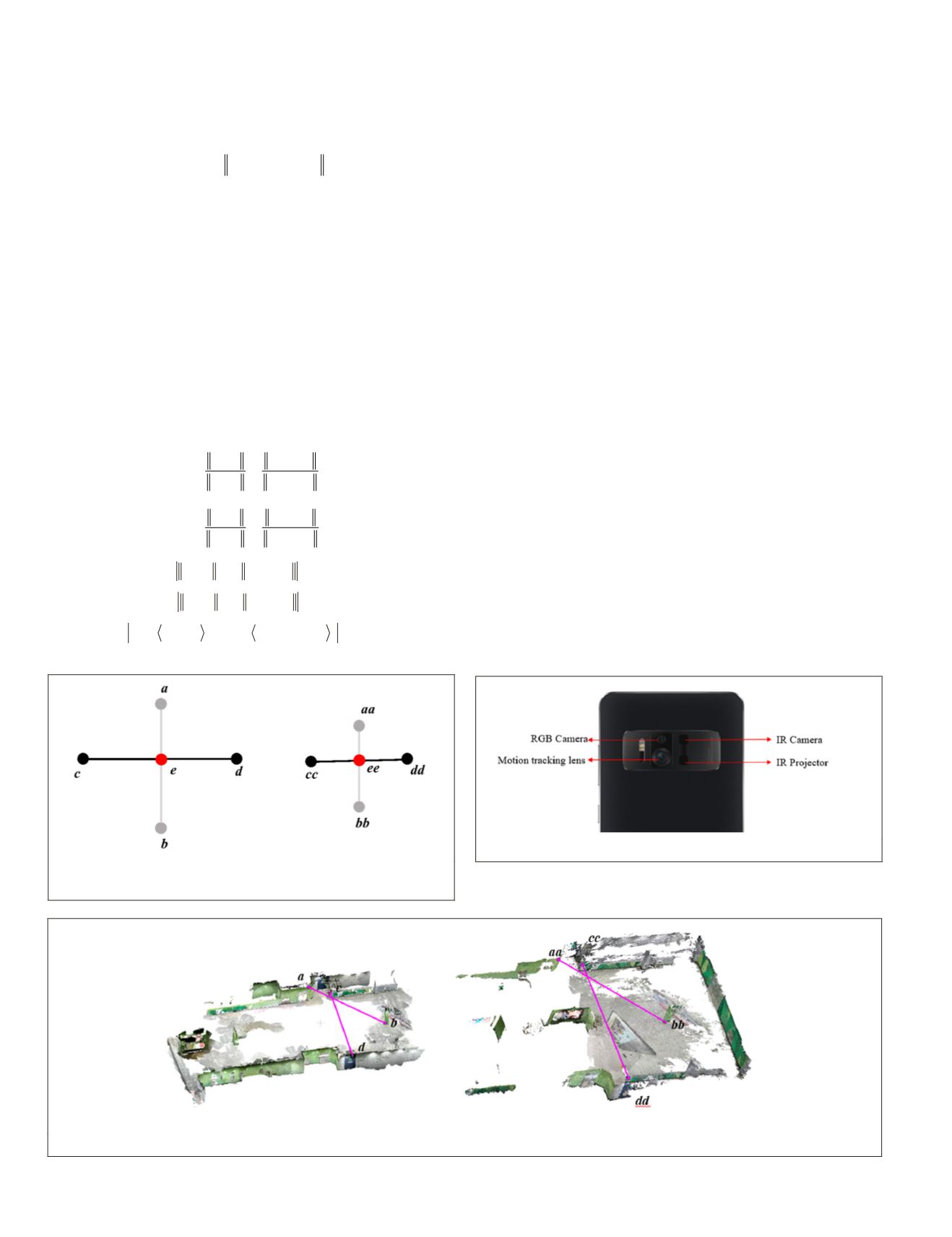
cases (see Figure 3). Letting
T
= {
a, b, c, d
} be four coplanar
points selected from a
SLAM
model, if the four points are not
all collinear, the line
ab
intersects the line
cd
at an interme-
diate point
e
. A corresponding base
is
TT
= {
aa, bb, cc, dd
} with an inter
invariants and scale constrain the s
point bases (see Equations 5–9).
r
a e
a b
aa ee
aa bb
1
=
-
-
≈
-
-
;
(5)
r
c e
c d
cc ee
cc dd
2
=
-
-
≈
-
-
;
(6)
a b aa bb
− − − ≤
α
ε
;
(7)
c d cc dd
− − − ≤
α
ε
;
(8)
cos( ,
) cos(
,
)
,
ab cd
aabb ccdd
−
≤
ω
(9)
where
r
1
and
r
2
are invariant ratios,
α
is the scale factor,
ε
,
and
ω
represent the given thresholds in the distance and
angle measurements, respectively, and
áñ
is an operator to
calculate the acute angle from crossed lines. Equations 5 and
6 represent the rule that intersection ratios of the diagonals
in an arbitrary planar quadrangle are invariant under affine
transformation (Huttenlocher 1991). Moreover, Equations 7–-9
strengthen geometric constraints for the correspondences in
both the distance and angle measurements. Figure 4 shows
an example of a setup of a four-point set in the
SLAM
dataset
(left), and one of its corresponding sets in the
SfM
+
MVS
data-
set (right).
Experimental Evaluation
Description of the Sensor and the Testing Sites
The performance of the proposed system is evaluated with
two datasets captured from different scenes. We use a Tango
Figure 5). Smartphones such as
d depth sensors, and the maximum
pth sensor is about 4 m. In our
e larger than the traditional working
scenes of the
RGB-D
sensors (that is, indoor applications). The
first dataset was captured along a corridor at a large public
rest area (see Figure 6), and the subsequent test was carried
out in a subway station (see Figure 7). In our experiments, we
captured most of the data in the scenes from along the wall.
Thus, the trajectory of the data collection does not cover the
entire scene, and the middle parts of the scenes are obviously
out of the working range of the depth sensor. Although these
two experiments are specially designed to test and prove
the proposed system, they can also be used to generate an
enhanced 3D model for mapping issues when the trajectories
cannot cover the whole scene or to build a large 3D model for
a more economical approach.
Figure 3. Illustration of the structure of the corresponding
four-point set.
Figure 4. Selection of the four-point sets in the
SLAM
model (left) and the
SfM
+
MVS
model (right).
Figure 5. Hardware scheme of the
RGB
-D sensor.
636
September 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


